3D Reachability Set for a Dubins Car

Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
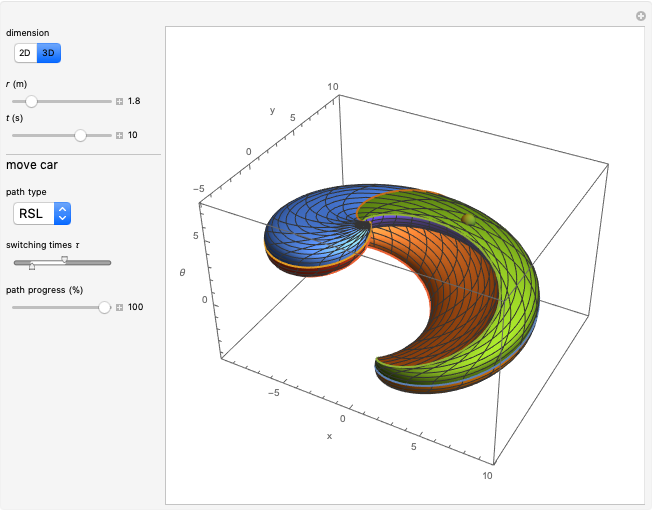
This Demonstration shows the set of  ,
, ,
,  positions reachable at time
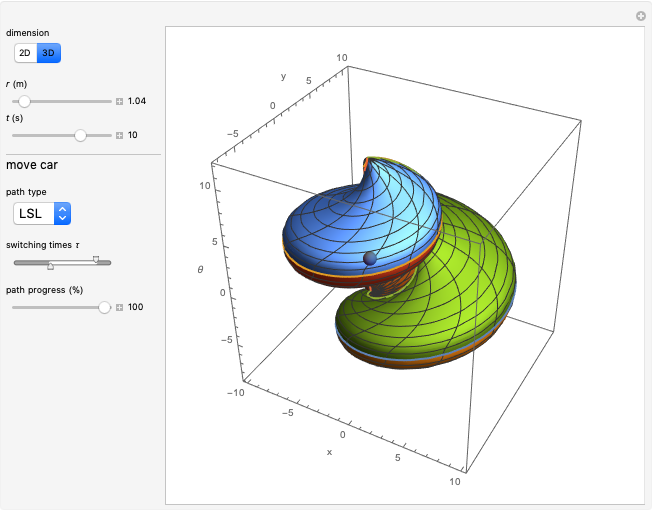
positions reachable at time  by a forward-moving car with a bounded velocity and a minimum turning radius
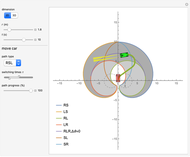
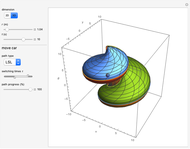
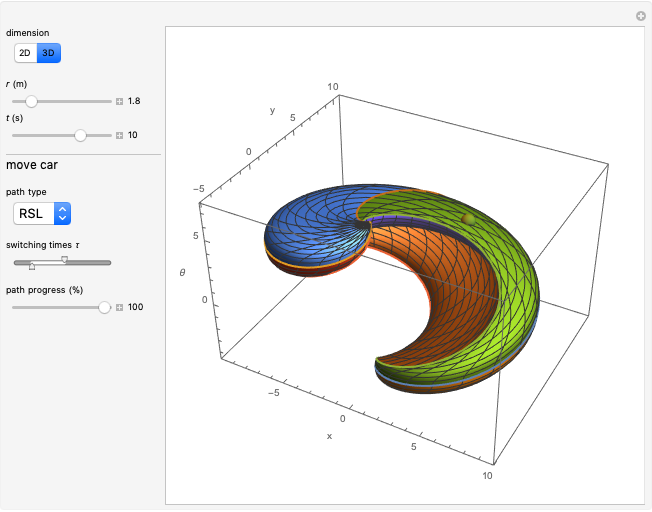
by a forward-moving car with a bounded velocity and a minimum turning radius  . This set is bounded by six parametric surfaces that correspond to the six types of optimal shortest paths: RSR, LSL, RSL, LSR, RLR, LRL. Here R stands for turning right at the maximum rate, L for turning left at the maximum rate and S for moving straight. Change the dimension to switch between a 2D projection of the set with an animated car and the full 3D set with a sphere at the car's final position and orientation.
. This set is bounded by six parametric surfaces that correspond to the six types of optimal shortest paths: RSR, LSL, RSL, LSR, RLR, LRL. Here R stands for turning right at the maximum rate, L for turning left at the maximum rate and S for moving straight. Change the dimension to switch between a 2D projection of the set with an animated car and the full 3D set with a sphere at the car's final position and orientation.
Contributed by: Mohammad Sultan and Aaron T. Becker (January 2021)
Open content licensed under CC BY-NC-SA
Snapshots
Details
The Dubins car is a simplified mathematical model of a car that moves in the  -
- plane [1]. The car's location is specified by the
plane [1]. The car's location is specified by the  location of the center of the car's rear axle and the orientation
location of the center of the car's rear axle and the orientation  of the car. The car cannot move sideways because the rear wheels would have to slide instead of roll. The Dubins car model stipulates that the car moves forward at a constant speed and has a maximum steering angle that translates into a minimum turning radius
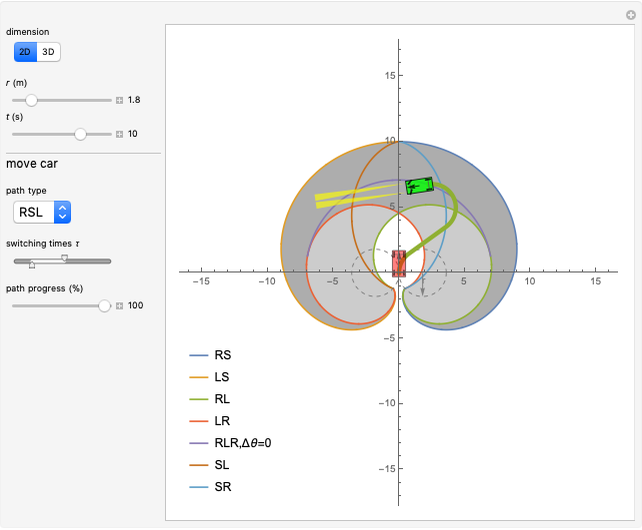
of the car. The car cannot move sideways because the rear wheels would have to slide instead of roll. The Dubins car model stipulates that the car moves forward at a constant speed and has a maximum steering angle that translates into a minimum turning radius  . In the 2D plot, the minimum turning radius circles are drawn tangent to the starting and ending positions with dashed gray circles.
. In the 2D plot, the minimum turning radius circles are drawn tangent to the starting and ending positions with dashed gray circles.
If the car has forward velocity of 1 unit per second, the system equations are
 ,
,
 ,
,
 ,
,
where  . The task is to minimize the length of the curve traced out by the center of the rear axle as it moves from the start to the goal. That path is the bounded-curvature shortest path. Dubins proved that the shortest path consists of no more than three segments, where in each segment
. The task is to minimize the length of the curve traced out by the center of the rear axle as it moves from the start to the goal. That path is the bounded-curvature shortest path. Dubins proved that the shortest path consists of no more than three segments, where in each segment  is
is  ,
,  or
or  . Denote these steering commands by R, S, L for turning right, going straight or turning left. A path is then coded with a three-letter word. The car follows the first command until switching time
. Denote these steering commands by R, S, L for turning right, going straight or turning left. A path is then coded with a three-letter word. The car follows the first command until switching time  , the second command until
, the second command until  and the third command until the final time
and the third command until the final time  .
.
If  , then the shortest path is a straight line. For nonzero
, then the shortest path is a straight line. For nonzero  , the shortest paths are of the form RSR, LSL, RSL, LSR, RLR, LRL. In this Demonstration, each path type and the corresponding parametric surface are given a different color:
, the shortest paths are of the form RSR, LSL, RSL, LSR, RLR, LRL. In this Demonstration, each path type and the corresponding parametric surface are given a different color:
RSR is light orange,
LSL is light blue,
RSL is green,
LSR brick red,
RLR is purple,
LRL is dark orange.
These surfaces are divided by seven 3D lines:
RS divides RSR and RSL and also bounds the 2D set from the outside right.
LS divides LSR and LSL and also bounds the 2D set from the outside left.
RL divides RSL from LRL for negative  and RLR for positive
and RLR for positive  . It also lower bounds the 2D set to the left.
. It also lower bounds the 2D set to the left.
LR divides LSR from LRL for negative  and RLR for positive
and RLR for positive  . It also lower bounds the 2D set to the right.
. It also lower bounds the 2D set to the right.
For RLR,  are all CCC paths that have no net change on
are all CCC paths that have no net change on  (so
(so  ). For LRL,
). For LRL,  gives the same line. These lines divide the optimal parametric surfaces for RLR and LRL. RLR and LRL overlap, but are optimal bounds if
gives the same line. These lines divide the optimal parametric surfaces for RLR and LRL. RLR and LRL overlap, but are optimal bounds if  and
and  .
.
SL divides LSL from RSL for positive  .
.
SR divides RSR from LSR for negative  .
.
See [2] for details about the 3D set reachable in time  .
.
References
[1] L. E. Dubins, "On Curves of Minimal Length with a Constraint on Average Curvature, and with Prescribed Initial and Terminal Positions and Tangents," American Journal of Mathematics, 79(3), 1957 pp. 497–516. doi:10.2307/2372560.
[2] V. S. Patsko, S. G. Pyatko and A. A. Fedotov, "Three-Dimensional Reachability Set for a Nonlinear Control System," Journal of Computer and Systems Sciences International, 42(3), 2003 pp. 320–328.
Permanent Citation
 The Homicidal Chauffeur Problem
The Homicidal Chauffeur Problem
Aaron T. Becker and Javier Garcia Isochrons for a Dubins Car
Isochrons for a Dubins Car
Aaron T. Becker and Shiva Shahrokhi Shortest Path for the Dubins Car
Shortest Path for the Dubins Car
Aaron T. Becker and Shiva Shahrokhi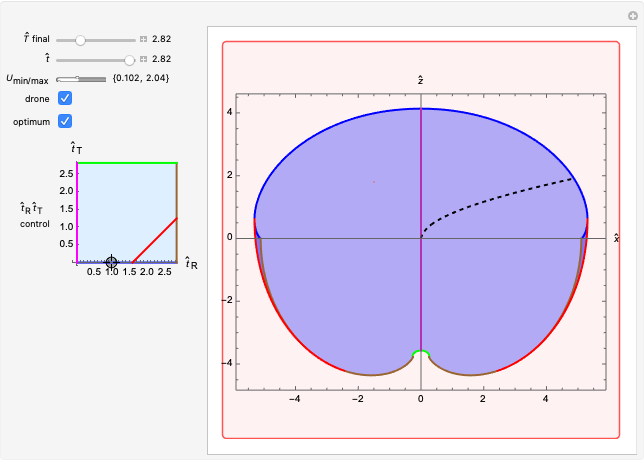 Reachable Set for a Drone
Reachable Set for a Drone
Mohammad Sultan and Aaron T. Becker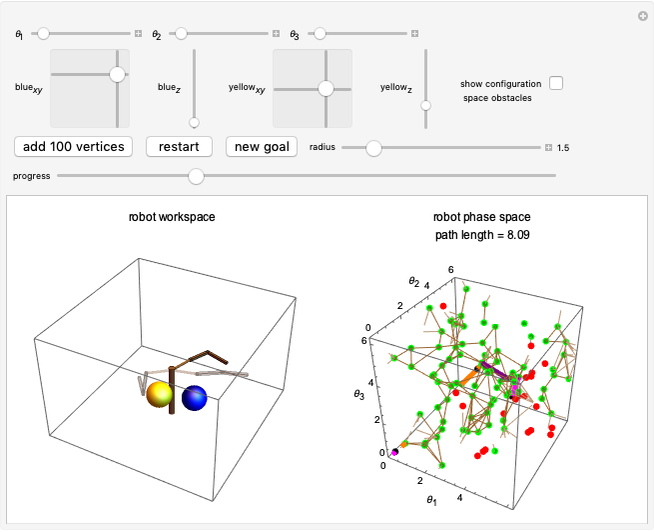 Probabilistic Roadmap Method in 3D
Probabilistic Roadmap Method in 3D
Aaron T. Becker and Yitong Lu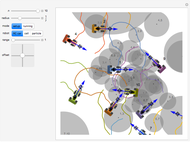 Steering Multiple Radio Control (RC) Cars with One Joystick
Steering Multiple Radio Control (RC) Cars with One Joystick
Aaron T. Becker and Javier Garcia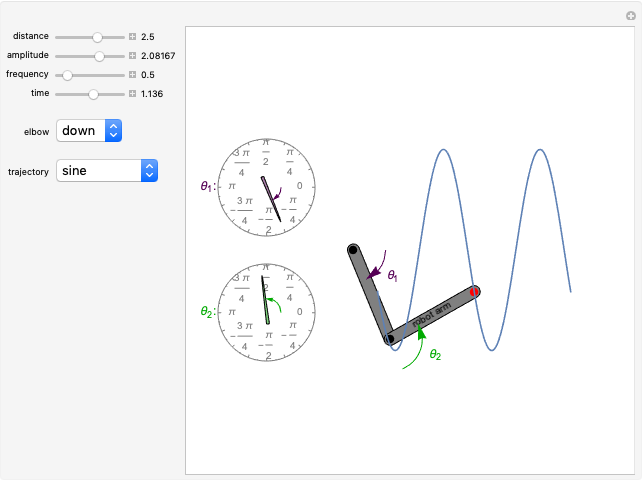 End Effector Trajectory Tracking for Planar Linkage
End Effector Trajectory Tracking for Planar Linkage
Tushar Mollik and Edmon Perkins Effects of Deformation on Actuated Joints
Effects of Deformation on Actuated Joints
Scott Kennedy and Edmon Perkins Rapidly Exploring Random Tree (RRT) and RRT*
Rapidly Exploring Random Tree (RRT) and RRT*
Aaron T. Becker and Li Huang Probabilistic Roadmap Method
Probabilistic Roadmap Method
Aaron T. Becker and Yitong Lu