Dzhanibekov Effect




Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
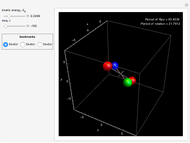
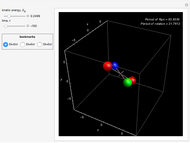
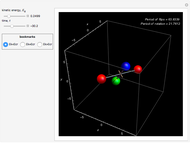
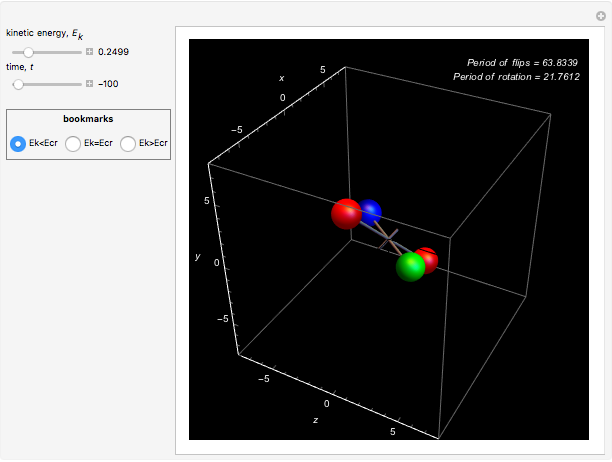
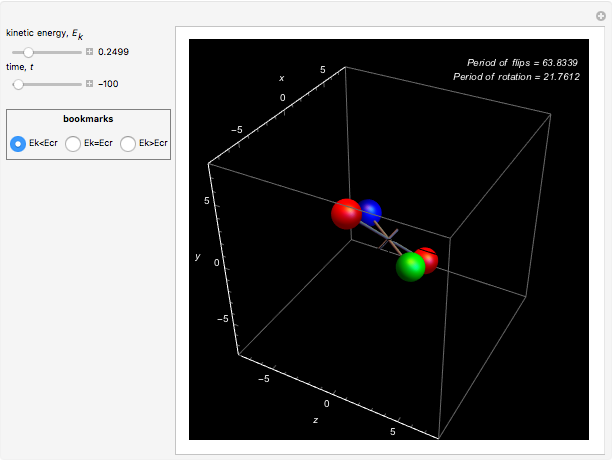
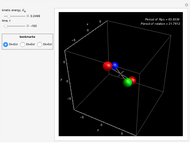
This Demonstration illustrates the Dzhanibekov effect, discovered on a Russian space station in 1985. Later on it was rediscovered as an unexpected behavior of a tennis racket flipped into the air. When  for the kinetic energy of an asymmetric top, the top can exhibit periodic flipping. Here
for the kinetic energy of an asymmetric top, the top can exhibit periodic flipping. Here  is the angular momentum and
is the angular momentum and  is the intermediate moment of inertia. In this Demonstration, the moments of inertia are chosen to be 1, 2, 3, and the magnitude of the angular momentum vector is normalized to 1. Flipping occurs when the kinetic energy
is the intermediate moment of inertia. In this Demonstration, the moments of inertia are chosen to be 1, 2, 3, and the magnitude of the angular momentum vector is normalized to 1. Flipping occurs when the kinetic energy  is very close to 0.25. When is exactly equal to 0.25, there is just one flip, here around
is very close to 0.25. When is exactly equal to 0.25, there is just one flip, here around  . The simulation is based on exact solutions of the Euler and Arnold equations for the angular momentum and the attitude matrix, using Mathematica's built-in elliptic functions JacobiSN, JacobiCN, JacobiDN, JacobiAmplitude and EllipticPi.
. The simulation is based on exact solutions of the Euler and Arnold equations for the angular momentum and the attitude matrix, using Mathematica's built-in elliptic functions JacobiSN, JacobiCN, JacobiDN, JacobiAmplitude and EllipticPi.
Contributed by: Arkadiusz Jadczyk (November 2016)
Open content licensed under CC BY-NC-SA
Snapshots

Details
Dzhanibekov's (or Janibekov's) effect was discovered in 1985 onboard the space station Salyut 7 [1]. Even though it was supposed to be kept secret (cf. [3]), in 1991 Ashbaugh, Chicone and Cushman published a paper describing the instability involved in this effect, for a tennis racket, in their paper "The Twisting Tennis Racket" [2]. The effect (unexpected twist) can be simulated numerically by solving the equations of motion expressed in terms of Euler angles [3]. Owing to the instability, the validity of numerical solutions is not reliable. Here, instead, we derive exact analytic solutions of the differential equations in terms of elliptic functions, as done in [4–7].
The model rigid body is chosen to be flat, with principal moments of inertia  ,
,  ,
,  . This is the simplest configuration that demonstrates the effect. The time scale in the code is adjusted so that the angular momentum vector is of length 1. Kinetic energy , which is constant along the trajectory, can in general take a value between
. This is the simplest configuration that demonstrates the effect. The time scale in the code is adjusted so that the angular momentum vector is of length 1. Kinetic energy , which is constant along the trajectory, can in general take a value between  and
and  . When
. When  , we have a particular trajectory with only one twist (with no need of elliptic functions). For close to or , we find precession. The repeated twists characteristic of the effect for are very close to
, we have a particular trajectory with only one twist (with no need of elliptic functions). For close to or , we find precession. The repeated twists characteristic of the effect for are very close to  . Two such positions are saved in the bookmarks. The Demonstration shows part of a single orbit for each value of . A general solution (when one needs to solve the initial values problem) can be obtained by shifting the time origin and possibly changing the signs in the definition of two of the three constants
. Two such positions are saved in the bookmarks. The Demonstration shows part of a single orbit for each value of . A general solution (when one needs to solve the initial values problem) can be obtained by shifting the time origin and possibly changing the signs in the definition of two of the three constants  ,
,  ,
,  . The effect is not affected by such changes.
. The effect is not affected by such changes.
References
[1] Dzhanibekov Effect in Space (in Russian) [Video]. (Nov 11, 2016) www.youtube.com/watch?v=gisSJKMpP9c.
[2] M. S. Ashbaugh, C. C. Chicone and R. H. Cushman, "The Twisting Tennis Racket", Journal of Dynamics and Differential Equations 3(1), 1991 pp. 67–85. doi.10.1007/BF01049489.
[3] M. Iwaniuk. "Dzhanibekov Effect or Tennis Racket Theorem" from Wolfram Community—A Wolfram Web Resource. (Nov 11, 2016), community.wolfram.com/groups/-/m/t/498246?p_p_auth=PV4kRYzg.
[4] R. van Zon and J. Schofield, "Numerical Implementation of the Exact Dynamics of Free Rigid Bodies", Journal of Computational Physics, 225(1), 2007 pp. 145–164. doi:10.1016/j.jcp.2006.11.019.
[5] A. G. Petrov and S. E. Volodin, “Janibekov's Effect and the Laws of Mechanics” (in Russian), Doklady Akademii Nauk, 451(4), 2013 pp. 399–403. doi:10.1134/S1028335813080041.
[6] E. Celledoni, F. Fassò, N. Säfström and A. Zanna, "The Exact Computation of the Free Rigid Body Motion and Its Use in Splitting Methods," SIAM Journal on Scientific Computing, 30(4), 2008 pp. 2084–2112. doi:10.1137/070704393.
[7] M. Romano, "Concise Form of the Dynamic and Kinematic Solutions of the Euler–Poinsot Problem," Advances in the Astronautical Sciences, 145(Part 1), Proceedings of the 1st International Academy of Astronautics Conference on Dynamics and Control of Space Systems (DyCoSS), March 19-21, 2012, Porto, Portugal, San Diego: Univelt, Inc., 2012 pp. 55–68. www.gbv.de/dms/tib-ub-hannover/733882633.pdf.
Permanent Citation
 The Intermediate Axis Theorem Applied to a Ping-Pong Paddle Flip-Over
The Intermediate Axis Theorem Applied to a Ping-Pong Paddle Flip-Over
Erik Mahieu Soccer Penalty Kicks
Soccer Penalty Kicks
Daniel Classon and Josh Seidman Dihedral Effects in Aircraft Flight
Dihedral Effects in Aircraft Flight
Mark Peterson Effects of a Force on the Orbit of an Artificial Satellite
Effects of a Force on the Orbit of an Artificial Satellite
Stelios Kapranidis The Effect of the Spherical Harmonic Gravitational Potential on Satellite Orbits
The Effect of the Spherical Harmonic Gravitational Potential on Satellite Orbits
Pradipto Ghosh Trajectory of a Tennis Serve
Trajectory of a Tennis Serve
Kevin Chen Launching a Rocket
Launching a Rocket
Frederick Wu Sputnik 1 Simulation
Sputnik 1 Simulation
Jack Vogt Controlling Airplane Flight
Controlling Airplane Flight
Enrique Zeleny Spacecraft Flying in Formation
Spacecraft Flying in Formation
Pradipto Ghosh
-
 Dzhanibekov Effect
Dzhanibekov Effect
Arkadiusz Jadczyk -
 Time Evolution of Squeezed Quantum States of the Harmonic Oscillator
Time Evolution of Squeezed Quantum States of the Harmonic Oscillator
Arkadiusz Jadczyk -
 Quantum Octahedral Fractal via Random Spin-State Jumps
Quantum Octahedral Fractal via Random Spin-State Jumps
Arkadiusz Jadczyk -
 Wigner Distribution Function for Harmonic Oscillator
Wigner Distribution Function for Harmonic Oscillator
Arkadiusz Jadczyk -
 Quantum Harmonic Oscillator Tunneling into Classically Forbidden Regions
Quantum Harmonic Oscillator Tunneling into Classically Forbidden Regions
Arkadiusz Jadczyk