Euler Angles for Space Shuttle




Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
The Euler (or Eulerian) angles, usually designated  ,
,  , and
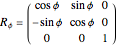
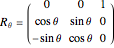
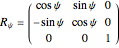
, and  , uniquely determine the orientation of a rigid body in three-dimensional space. There are several conflicting conventions for defining the Euler angles, depending on the choice of axes and the order in which rotations about these axes are performed. This Demonstration uses the convention described in MathWorld, hyperlinked below in Related Links. This is most commonly used in physics and is known as the "
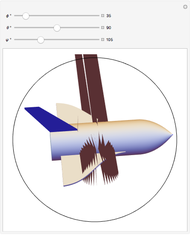
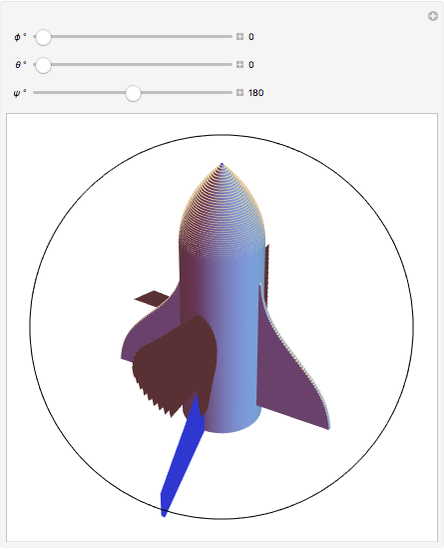
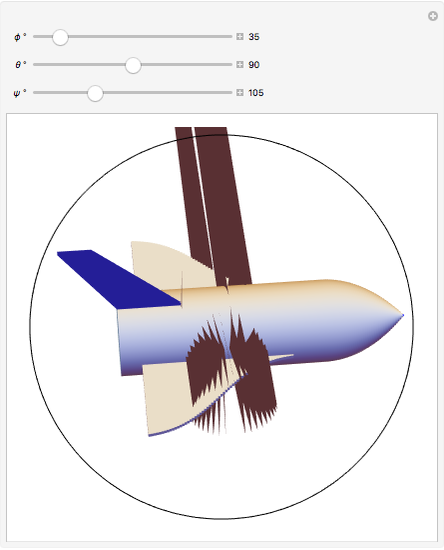
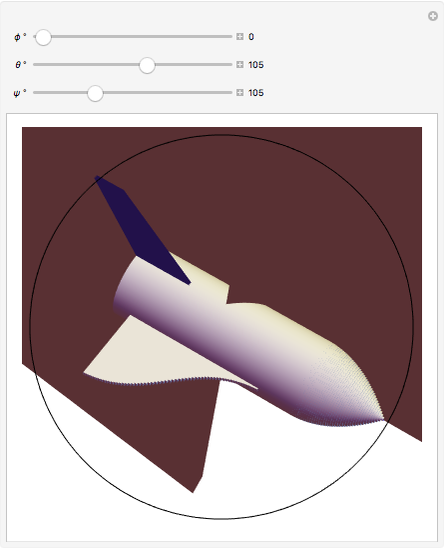
, uniquely determine the orientation of a rigid body in three-dimensional space. There are several conflicting conventions for defining the Euler angles, depending on the choice of axes and the order in which rotations about these axes are performed. This Demonstration uses the convention described in MathWorld, hyperlinked below in Related Links. This is most commonly used in physics and is known as the " convention." For topical relevance, NASA's space shuttle is chosen as the rigid body. The angles and are analogous to the spherical polar coordinates orienting the main axis of the shuttle, while describes rotation about this axis. The ranges of the three Euler angles are given by:
convention." For topical relevance, NASA's space shuttle is chosen as the rigid body. The angles and are analogous to the spherical polar coordinates orienting the main axis of the shuttle, while describes rotation about this axis. The ranges of the three Euler angles are given by:  ,
,  , and
, and  . The corresponding motions of a rigid body are termed nutation, precession and intrinsic rotation.
. The corresponding motions of a rigid body are termed nutation, precession and intrinsic rotation.











Contributed by: S. M. Blinder (March 2011)
With a correction by Joeri Gerlo, University of Ghent
Open content licensed under CC BY-NC-SA
Snapshots


Details
Permanent Citation
 Constructing Vector Geometry Solutions
Constructing Vector Geometry Solutions
Michael Rogers (Oxford College of Emory University) Calabi-Yau Space
Calabi-Yau Space
Andrew J. Hanson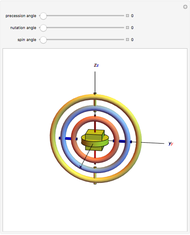 Euler Angles: Precession, Nutation, and Spin
Euler Angles: Precession, Nutation, and Spin
Kevin Hernandez Cross Product in Spherical Coordinates
Cross Product in Spherical Coordinates
S. M. Blinder and Amy Blinder Schwarzschild Space-Time Embedding Diagram
Schwarzschild Space-Time Embedding Diagram
Ben Langton Space-Quantization of Angular Momentum
Space-Quantization of Angular Momentum
S. M. Blinder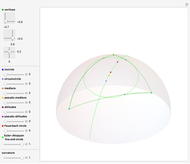 Fate of the Euler Line and the Nine-Point Circle on the Sphere
Fate of the Euler Line and the Nine-Point Circle on the Sphere
Paolo Maraner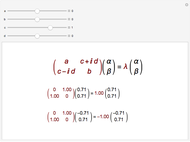 Eigenvalue Problem for 2×2 Hermitian Matrices
Eigenvalue Problem for 2×2 Hermitian Matrices
S. M. Blinder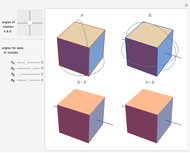 Combining Two 3D Rotations
Combining Two 3D Rotations
George Beck and Jeff Bryant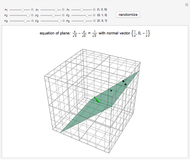 Three Points Determine a Plane
Three Points Determine a Plane
Ed Pegg Jr
-
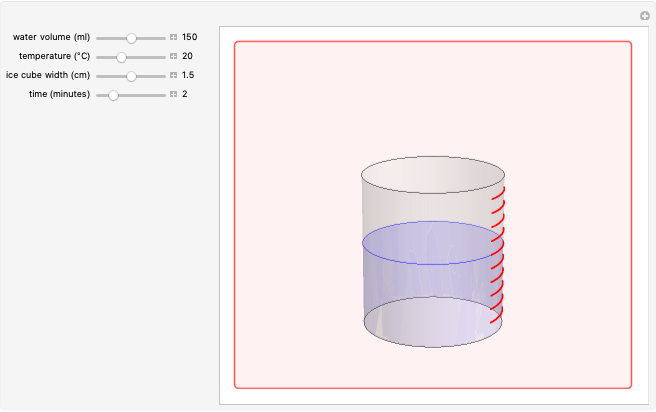 Ice Cube Melting in Water
Ice Cube Melting in Water
S. M. Blinder -
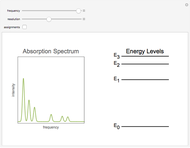 Absorption Spectroscopy
Absorption Spectroscopy
S. M. Blinder -
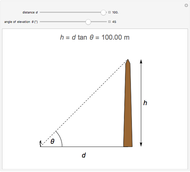 Height of Object from Angle of Elevation Using Tangent
Height of Object from Angle of Elevation Using Tangent
S. M. Blinder -
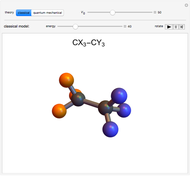 Internal Rotation in Ethane and Substituted Analogs
Internal Rotation in Ethane and Substituted Analogs
S. M. Blinder -
 Topological Spaces on Three Points
Topological Spaces on Three Points
S. M. Blinder -
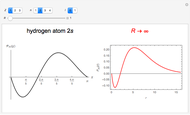 Hydrogen Atom in Curved Space
Hydrogen Atom in Curved Space
S. M. Blinder -
 Multipurpose Tool
Multipurpose Tool
S. M. Blinder -
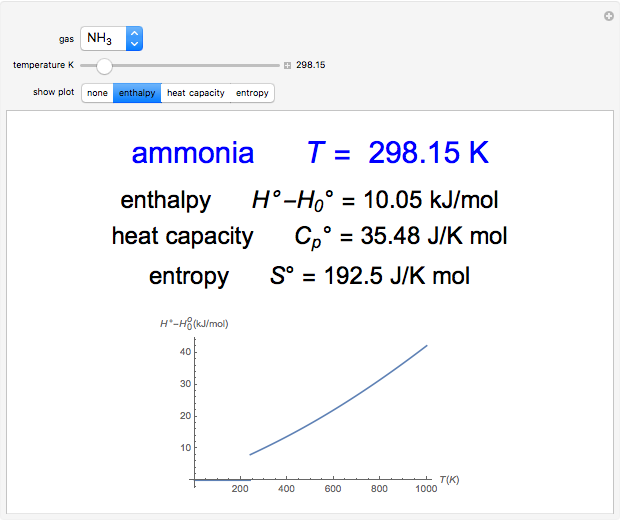 Statistical Thermodynamics of Ideal Gases
Statistical Thermodynamics of Ideal Gases
S. M. Blinder -
 Bell's Theorem
Bell's Theorem
S. M. Blinder -
 Kepler's Mysterium Cosmographicum
Kepler's Mysterium Cosmographicum
S. M. Blinder -
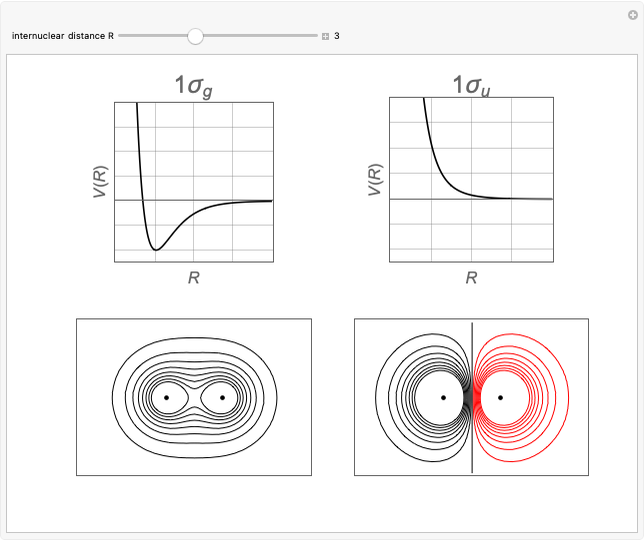 Bonding and Antibonding Molecular Orbitals
Bonding and Antibonding Molecular Orbitals
S. M. Blinder -
 Visible and Invisible Intersections in the Cartesian Plane
Visible and Invisible Intersections in the Cartesian Plane
S. M. Blinder -
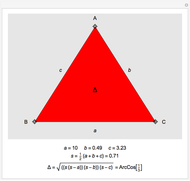 Heron's Formula
Heron's Formula
S. M. Blinder -
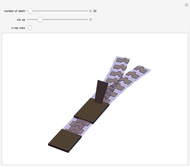 How Zippers Work
How Zippers Work
S. M. Blinder -
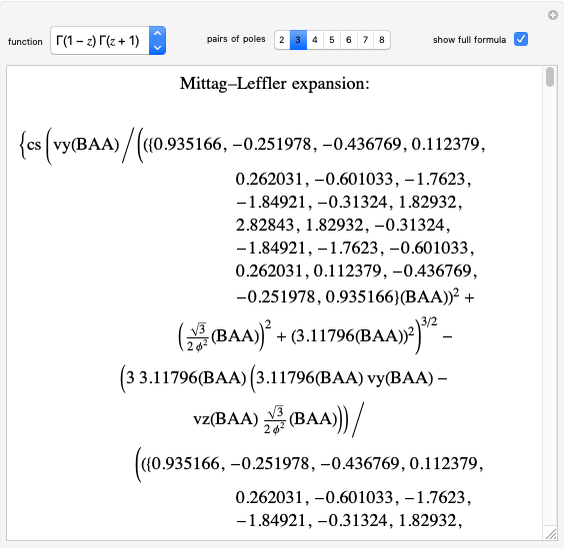 Mittag-Leffler Expansions of Meromorphic Functions
Mittag-Leffler Expansions of Meromorphic Functions
S. M. Blinder -
 Orbital Resonance in the Asteroid Belt
Orbital Resonance in the Asteroid Belt
S. M. Blinder -
 Jordan's Lemma Applied to the Evaluation of Some Infinite Integrals
Jordan's Lemma Applied to the Evaluation of Some Infinite Integrals
S. M. Blinder -
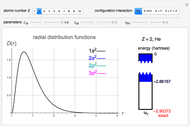 Configuration Interaction for the Helium Isoelectronic Series
Configuration Interaction for the Helium Isoelectronic Series
S. M. Blinder -
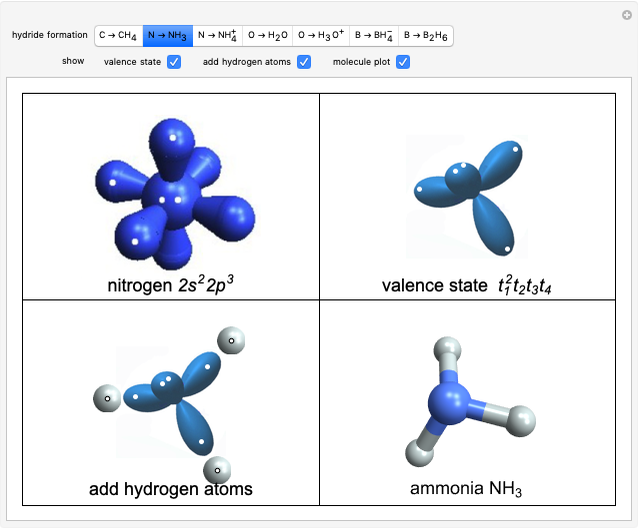 Structure and Bonding of Second-Row Hydrides
Structure and Bonding of Second-Row Hydrides
S. M. Blinder -
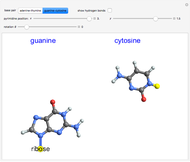 DNA Base Pairing
DNA Base Pairing
S. M. Blinder