Evolution of a Gaussian Wave Packet



Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
A Gaussian wave packet centered around  at time
at time  with an average initial momentum
with an average initial momentum  can be represented by the wavefunction
can be represented by the wavefunction  . (For convenience, we take
. (For convenience, we take  .) The solution of the free-particle Schrödinger equation with this initial condition works out to
.) The solution of the free-particle Schrödinger equation with this initial condition works out to  . The probability density is then given by
. The probability density is then given by  , where
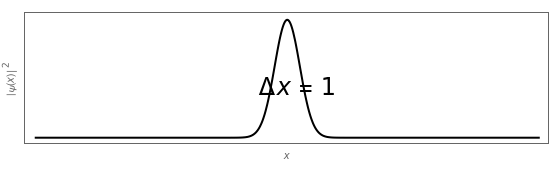
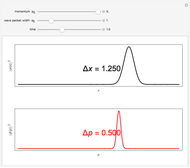
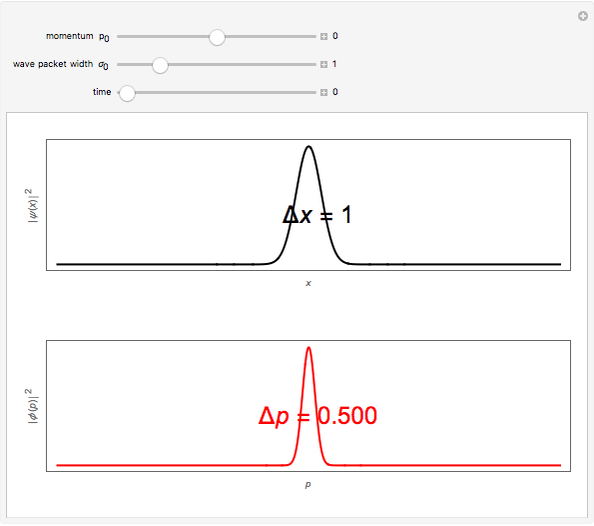
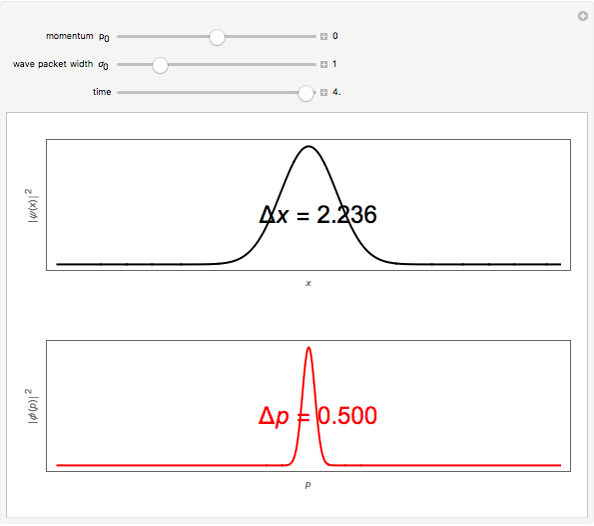
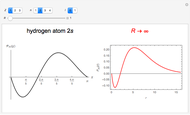
, where  , shown as a black curve. The wave packet remains Gaussian as it spreads out, with its center moving to
, shown as a black curve. The wave packet remains Gaussian as it spreads out, with its center moving to  , thereby following the classical trajectory of the particle. The corresponding momentum probability distribution is given by
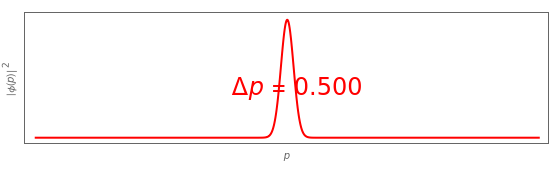
, thereby following the classical trajectory of the particle. The corresponding momentum probability distribution is given by  , shown in red. The rms uncertainties are given by
, shown in red. The rms uncertainties are given by  ,
,  , which is independent of
, which is independent of  . This is consistent with the fact that
. This is consistent with the fact that  is a constant of the motion for a free particle.
is a constant of the motion for a free particle.




Contributed by: S. M. Blinder (March 2011)
With corrections by: Stefano Rigolin and Michael Trott
Open content licensed under CC BY-NC-SA
Snapshots

Details
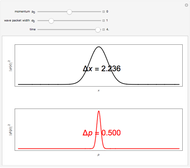
Snapshot 1-3: the position probability distribution broadens with increasing , while the momentum distribution moves with but retains its original width
Reference: S. M. Blinder, "Evolution of a Gaussian Wavepacket," Am J Phys 36(6), 1968 pp. 525–526.
Permanent Citation
 Time-Evolution of a Wavepacket in a Square Well
Time-Evolution of a Wavepacket in a Square Well
Michael Trott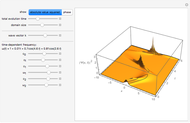 Time Evolution of Quantum-Mechanical Harmonic Oscillator with Time-Dependent Frequency
Time Evolution of Quantum-Mechanical Harmonic Oscillator with Time-Dependent Frequency
Michael Trott with permission of Springer. Wave-Particle Duality in the Double-Slit Experiment
Wave-Particle Duality in the Double-Slit Experiment
S. M. Blinder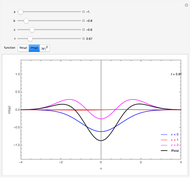 Wave Packet Dynamics
Wave Packet Dynamics
Gerhard Schwaab and Chantal Lorbeer (Ruhr University, Bochum) Scattering of a Gaussian Wave Packet on an Infinite Wall
Scattering of a Gaussian Wave Packet on an Infinite Wall
Michael Trott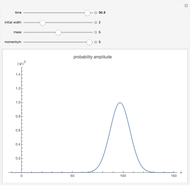 Spread of a Gaussian Wave Packet with Time
Spread of a Gaussian Wave Packet with Time
Radhika Prasad and Sarbani Chatterjee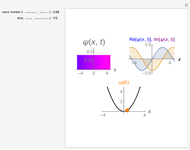 Time Evolution of a Quantum Free Particle in 1D
Time Evolution of a Quantum Free Particle in 1D
Porscha McRobbie and Eitan Geva Time Evolution of a Quantum Free Particle in 2D
Time Evolution of a Quantum Free Particle in 2D
Porscha McRobbie and Eitan Geva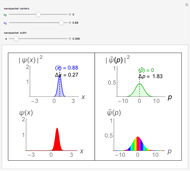 Probability Densities, Expectation Values, and Uncertainties for Gaussian Wavepackets
Probability Densities, Expectation Values, and Uncertainties for Gaussian Wavepackets
Porscha McRobbie and Eitan Geva Solitary Wave Solution to the Nonlinear Schrödinger Equation
Solitary Wave Solution to the Nonlinear Schrödinger Equation
Kwan-yuet Ho
-
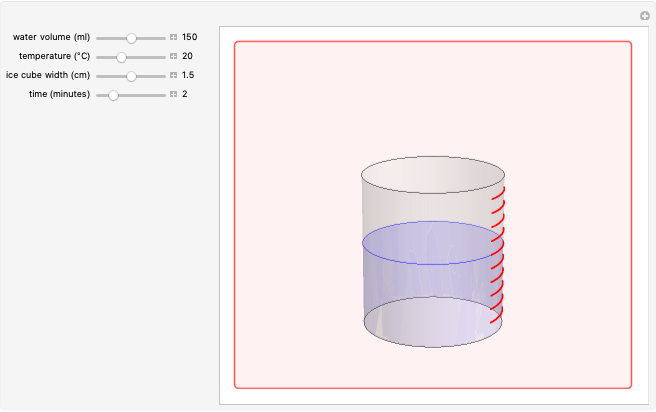 Ice Cube Melting in Water
Ice Cube Melting in Water
S. M. Blinder -
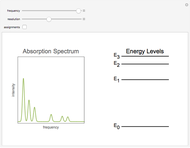 Absorption Spectroscopy
Absorption Spectroscopy
S. M. Blinder -
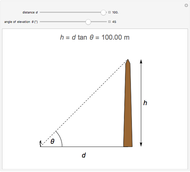 Height of Object from Angle of Elevation Using Tangent
Height of Object from Angle of Elevation Using Tangent
S. M. Blinder -
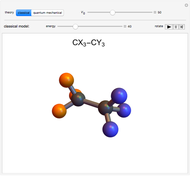 Internal Rotation in Ethane and Substituted Analogs
Internal Rotation in Ethane and Substituted Analogs
S. M. Blinder -
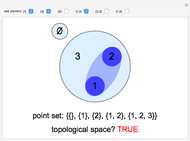 Topological Spaces on Three Points
Topological Spaces on Three Points
S. M. Blinder -
 Hydrogen Atom in Curved Space
Hydrogen Atom in Curved Space
S. M. Blinder -
 Multipurpose Tool
Multipurpose Tool
S. M. Blinder -
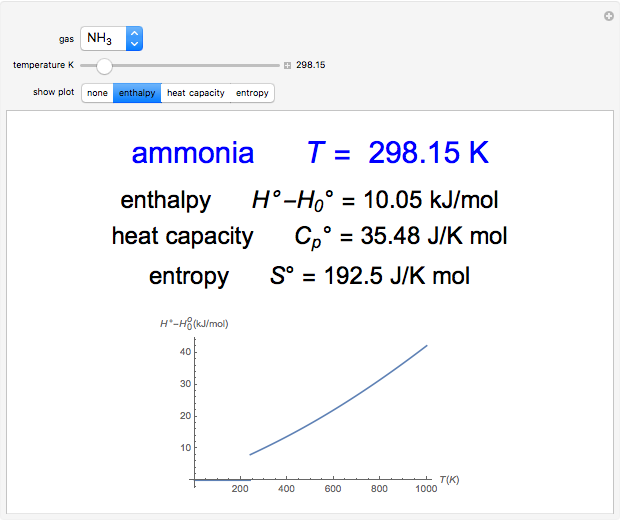 Statistical Thermodynamics of Ideal Gases
Statistical Thermodynamics of Ideal Gases
S. M. Blinder -
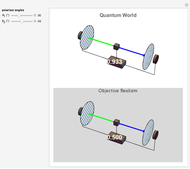 Bell's Theorem
Bell's Theorem
S. M. Blinder -
 Kepler's Mysterium Cosmographicum
Kepler's Mysterium Cosmographicum
S. M. Blinder -
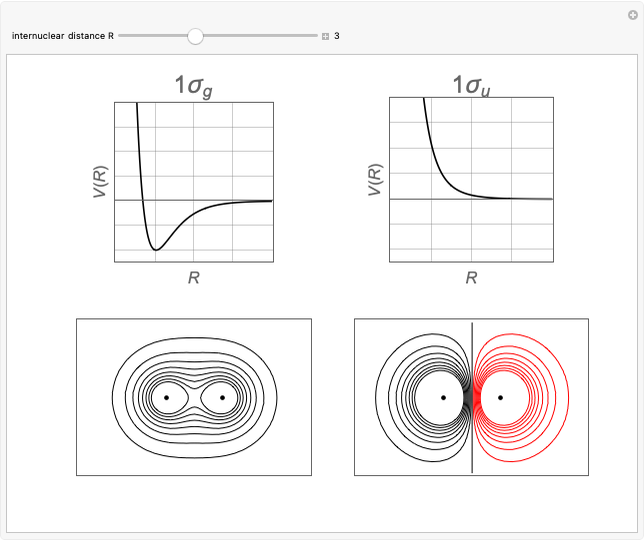 Bonding and Antibonding Molecular Orbitals
Bonding and Antibonding Molecular Orbitals
S. M. Blinder -
 Visible and Invisible Intersections in the Cartesian Plane
Visible and Invisible Intersections in the Cartesian Plane
S. M. Blinder -
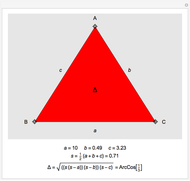 Heron's Formula
Heron's Formula
S. M. Blinder -
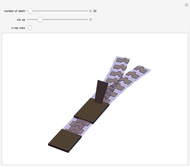 How Zippers Work
How Zippers Work
S. M. Blinder -
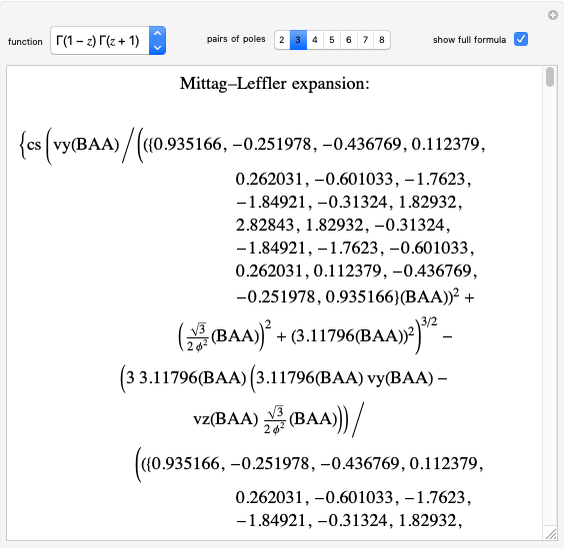 Mittag-Leffler Expansions of Meromorphic Functions
Mittag-Leffler Expansions of Meromorphic Functions
S. M. Blinder -
 Orbital Resonance in the Asteroid Belt
Orbital Resonance in the Asteroid Belt
S. M. Blinder -
 Jordan's Lemma Applied to the Evaluation of Some Infinite Integrals
Jordan's Lemma Applied to the Evaluation of Some Infinite Integrals
S. M. Blinder -
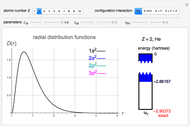 Configuration Interaction for the Helium Isoelectronic Series
Configuration Interaction for the Helium Isoelectronic Series
S. M. Blinder -
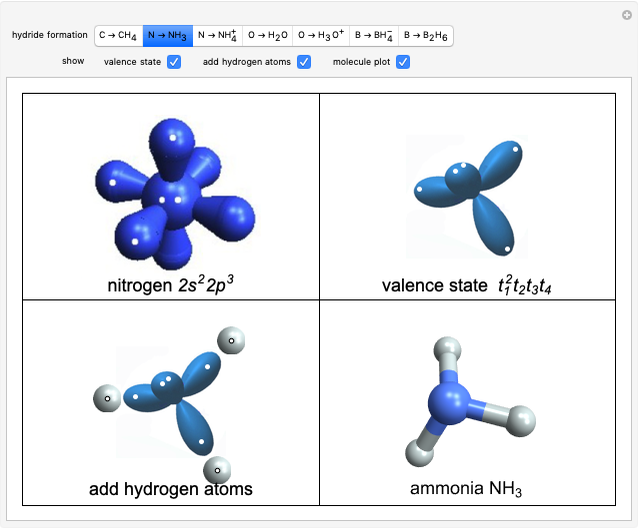 Structure and Bonding of Second-Row Hydrides
Structure and Bonding of Second-Row Hydrides
S. M. Blinder -
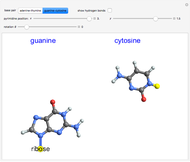 DNA Base Pairing
DNA Base Pairing
S. M. Blinder