Hertzian Contact Stress






Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
Over a century ago Hertz established a theory of contact mechanics that is still used today by engineers working in tribology. To make his theory accessible for engineering applications, the program calculates a fast and accurate solution.
[more]
Contributed by: Frederick Wu (September 2008)
With corrections by: Mark Tausch and Jaebum Jung
Open content licensed under CC BY-NC-SA
Snapshots


Details
Snapshot 1: an approximate point contact zone— two surfaces touch at a single point
Snapshot 2: a typical elliptical contact zone between a ball and an inner ring in a ball bearing assembly
Snapshot 3: a typical elliptical contact zone between a ball and an outer ring in a ball bearing assembly
All calculations are in standard international (SI) or metric system units.
 is the geometry parameter of contact body one (radius of ball in red).
is the geometry parameter of contact body one (radius of ball in red).
 is the geometry parameter of contact body two (radius of raceway in green).
is the geometry parameter of contact body two (radius of raceway in green).
 is the geometry parameter of contact body two (the distance from raceway bottom to shaft axes).
is the geometry parameter of contact body two (the distance from raceway bottom to shaft axes).
 and
and  are moduli of elasticity of the contact bodies one and two.
are moduli of elasticity of the contact bodies one and two.
 and
and  are the Poisson's ratios of contact bodies one and two.
are the Poisson's ratios of contact bodies one and two.
 is the force between the two contact bodies (ball and raceway).
is the force between the two contact bodies (ball and raceway).
The top-left plot shows in 3D the geometry of the two contact bodies, especially relevantt for ball bearing engineering analysis.
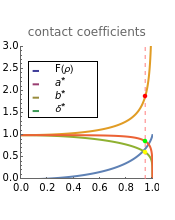
The top-right plot shows the contact coefficient data based on numerical methods to solve elliptic integrals equations.
ρ is the curvature of the contact body surface, that is the reciprocal of the curvature radius of body,  .
.
 is the curvature sum,
is the curvature sum,  . The subscripts I and II are for the first and second contact bodies. The subscripts 1 and 2 are for the first and second planes of the contact bodies.
. The subscripts I and II are for the first and second contact bodies. The subscripts 1 and 2 are for the first and second planes of the contact bodies.
 is the curvature difference,
is the curvature difference,  .
.
 is the dimensionless semimajor axis of the contact ellipse.
is the dimensionless semimajor axis of the contact ellipse.
 is the dimensionless semiminor axis of the contact ellipse.
is the dimensionless semiminor axis of the contact ellipse.
 is the dimensionless parameter of the contact deformation.
is the dimensionless parameter of the contact deformation.
The bottom-left plot shows the contact zone with a color function; this visualizes Hertzian contact zone and stress distribution.
The bottom-right table summarizes the calculation.
 is the semimajor axis of the projected elliptical contact area.
is the semimajor axis of the projected elliptical contact area.
 is the semiminor axes of the projected elliptical contact area.
is the semiminor axes of the projected elliptical contact area.
 is the area of the projected elliptical contact area.
is the area of the projected elliptical contact area.
 is the ratio of the semimajor to the semiminor axis (/) of the elliptical contact area.
is the ratio of the semimajor to the semiminor axis (/) of the elliptical contact area.
 is the maximum Hertztian contact stress.
is the maximum Hertztian contact stress.
 is the average Hertztian contact stress.
is the average Hertztian contact stress.
 is the deformation of the contact zone.
is the deformation of the contact zone.
For more details, see Chapter 7 of F. Wu, Manipulate@Mathematica, Beijing: Tsinghua, 2010.
References:
[1] H. R. Hertz, "Über die Berührung fester elastischer Körper (On Contact Between Elastic Bodies)," Journal für die reine und angewandte Mathematik 92, 1881 pp. 156–171.
[2] T. A. Harris, "Contact Stress and Deformation", Rolling Bearing Analysis, 4th ed., New York: Wiley, 2001 pp. 183–204.
Permanent Citation
 Positive-Contact Claw Clutch
Positive-Contact Claw Clutch
Sándor Kabai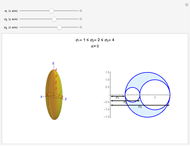 Lamé's Ellipsoid and Mohr's Circles (Part 1)
Lamé's Ellipsoid and Mohr's Circles (Part 1)
Luis Martín Yagüe, Agustín Lacort, and Antxon Sánchez Parandiet Hand Model
Hand Model
Sándor Kabai Lift Table
Lift Table
Sándor Kabai Plotting Closed Curves with a Four Bar Linkage
Plotting Closed Curves with a Four Bar Linkage
Sándor Kabai Flow through an Open Channel
Flow through an Open Channel
Eduardo de la Torre Pascual Steam Locomotive Drive
Steam Locomotive Drive
Sándor Kabai Elliptical Drive
Elliptical Drive
Sándor Kabai Wedge Operated Jig
Wedge Operated Jig
Sándor Kabai and Lajos Szilassi Swash Plate Drive
Swash Plate Drive
Sándor Kabai
-
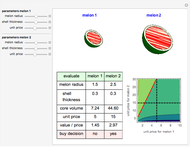 Buying Watermelons Intelligently
Buying Watermelons Intelligently
Frederick Wu -
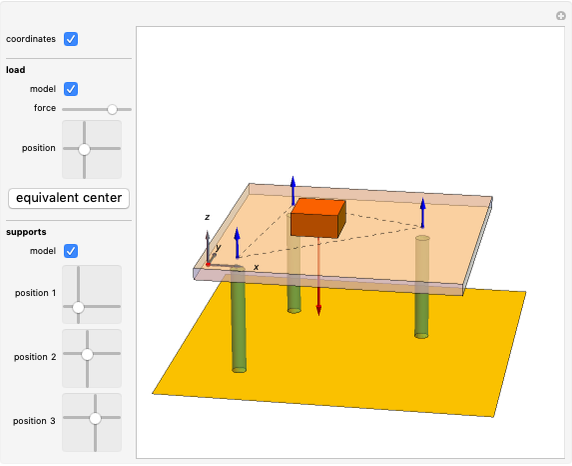 Static Equilibrium for a Plate with Support at Three Points
Static Equilibrium for a Plate with Support at Three Points
Frederick Wu -
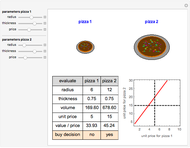 Evaluate Hot Pizza
Evaluate Hot Pizza
Frederick Wu -
 Rubik's Snake Puzzle
Rubik's Snake Puzzle
Frederick Wu -
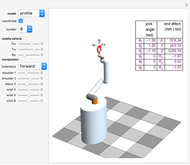 Mobile Robot with Single Manipulator
Mobile Robot with Single Manipulator
Frederick Wu -
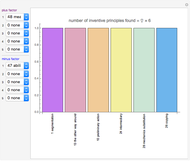 Multiple Input Parameters for TRIZ Matrix Application
Multiple Input Parameters for TRIZ Matrix Application
Frederick Wu -
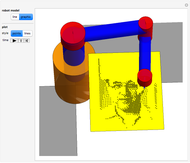
 Joint Space and Tooling Space for Robot Motion Control
Joint Space and Tooling Space for Robot Motion Control
Frederick Wu -
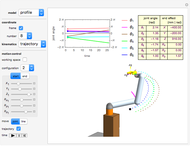
 Trajectory Planning of Robot for Painting Art
Trajectory Planning of Robot for Painting Art
Frederick Wu -
 Inverse Kinematics for a Robot Manipulator with Six Degrees of Freedom
Inverse Kinematics for a Robot Manipulator with Six Degrees of Freedom
Frederick Wu -
 Spring-Mass-Damping System with Two Degrees of Freedom
Spring-Mass-Damping System with Two Degrees of Freedom
Frederick Wu -
 When Do the Three Hands of an Analog Clock Overlap?
When Do the Three Hands of an Analog Clock Overlap?
Frederick Wu -
 Hertzian Contact Stress
Hertzian Contact Stress
Frederick Wu -
 Launching a Rocket
Launching a Rocket
Frederick Wu -
 Kinematics of Biped Legs for Humanoid Robots
Kinematics of Biped Legs for Humanoid Robots
Frederick Wu -
 Intersection of a Convex Polyhedron and a Plane
Intersection of a Convex Polyhedron and a Plane
Frederick Wu -
 Kinematics of a Redundant Anthropomorphic Arm with Seven Degrees of Freedom
Kinematics of a Redundant Anthropomorphic Arm with Seven Degrees of Freedom
Frederick Wu -
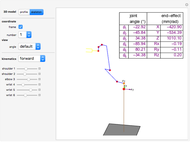
 Forward and Inverse Kinematics of the SCARA Robot
Forward and Inverse Kinematics of the SCARA Robot
Frederick Wu -
 Forward Kinematics of Humanoid Robots
Forward Kinematics of Humanoid Robots
Frederick Wu -
 Complex Addition of Harmonic Motions and the Phenomenon of Beats
Complex Addition of Harmonic Motions and the Phenomenon of Beats
Frederick Wu -
 Shortening the 29th Olympic Torch Tour
Shortening the 29th Olympic Torch Tour
Frederick Wu