Inverse Kinematics




Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
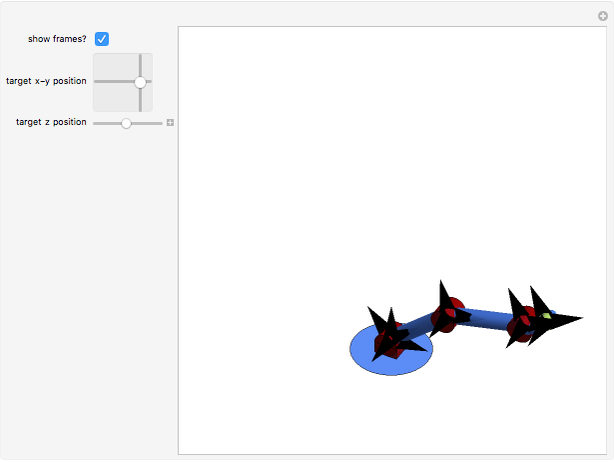
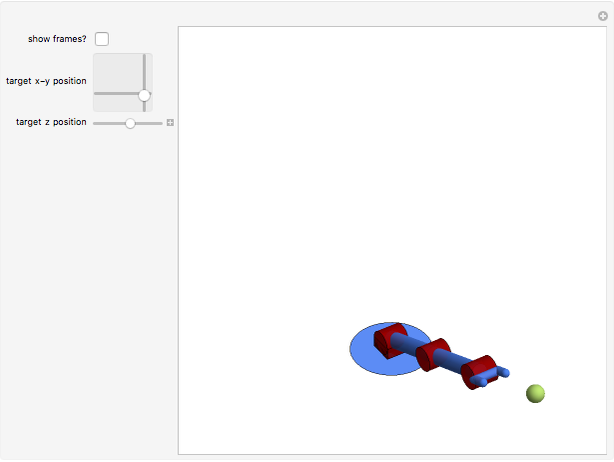
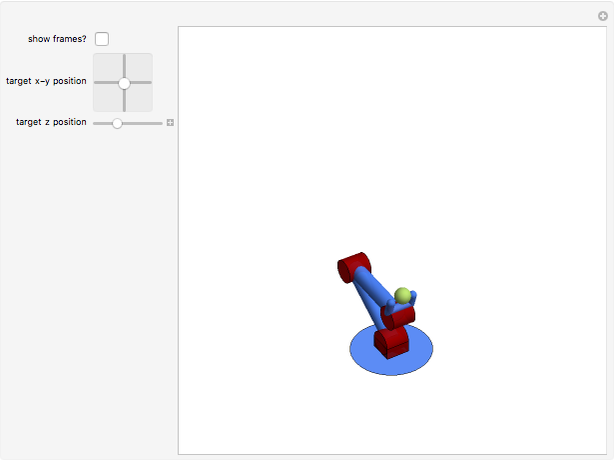
Use the sliders to control the position of the green ball. The robot arm will attempt to keep a hold of the green ball.
Contributed by: Rob Lockhart (March 2011)
After work by: Oussama Khatib
Open content licensed under CC BY-NC-SA
Snapshots
Details
This is actually a rather simple-minded specific solution to inverse kinematics, but since the dynamic programming solution is harder to implement in a functional language, I chose this straightforward approach.
This Demonstration was inspired by Professor Oussama Khatib's Introduction to Robotics Course, available free online through Stanford's Engineering Everywhere.
Permanent Citation
"Inverse Kinematics"
http://demonstrations.wolfram.com/InverseKinematics/
Wolfram Demonstrations Project
Published: March 7 2011
 Forward Kinematics
Forward Kinematics
Rob Lockhart Snake-Arm Robot
Snake-Arm Robot
Sándor Kabai Hand Model
Hand Model
Sándor Kabai Fractal Robot Arm
Fractal Robot Arm
Sándor Kabai Loops around a Cuboctahedron
Loops around a Cuboctahedron
Sándor Kabai Table Legs Made of a Single Bent Bar
Table Legs Made of a Single Bent Bar
Sándor Kabai Hilbert and Moore 3D Fractal Curves
Hilbert and Moore 3D Fractal Curves
Robert Dickau Rimless Wheel Locomotion
Rimless Wheel Locomotion
Te-yuan Chyou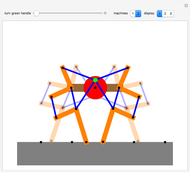 Jansen Walker
Jansen Walker
Karl Scherer Inverse Kinematics in Redundant Robot Manipulator
Inverse Kinematics in Redundant Robot Manipulator
André Carvalho
-
 Forward and Inverse Kinematics of the SCARA Robot
Forward and Inverse Kinematics of the SCARA Robot
Rob Lockhart -
 Fun with Koch Snowflakes
Fun with Koch Snowflakes
Rob Lockhart -
 Mong
Mong
Rob Lockhart -
 Inverse Kinematics
Inverse Kinematics
Rob Lockhart -
Forward Kinematics
Rob Lockhart -
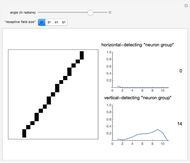 2D Cellular Automata for Feature Detection
2D Cellular Automata for Feature Detection
Rob Lockhart -
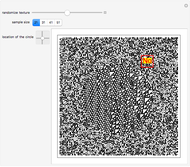 2D Cellular Automata for Texture Recognition
2D Cellular Automata for Texture Recognition
Rob Lockhart -
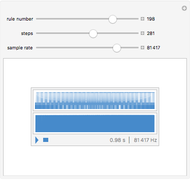 Hearing Cellular Automata
Hearing Cellular Automata
Rob Lockhart