Joint Space and Tooling Space for Robot Motion Control

Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
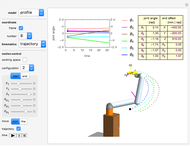
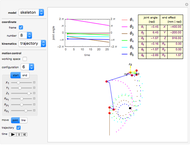
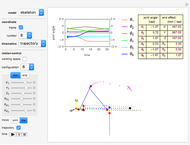
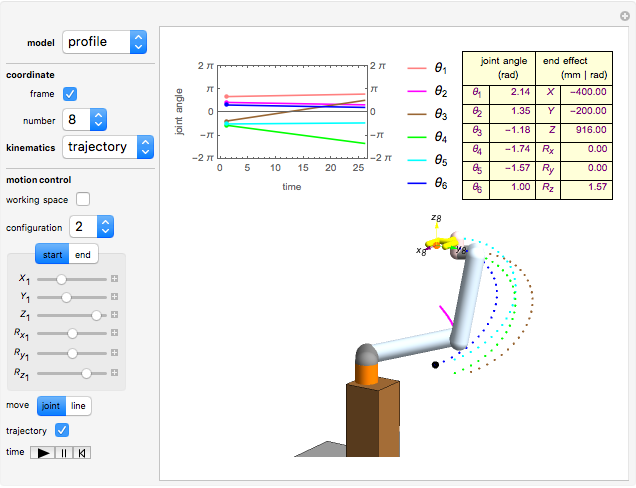
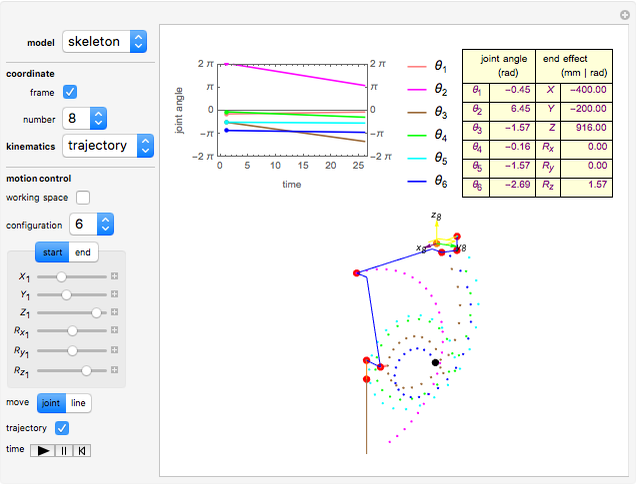
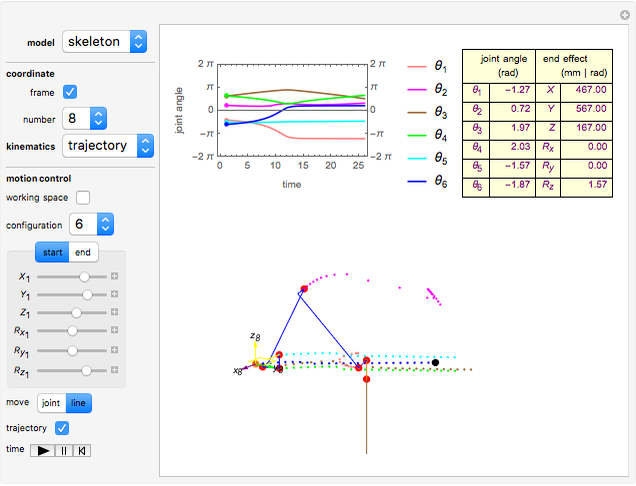
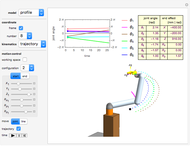
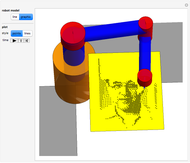
This Demonstration shows the move-joint and move-line methods that are used to control the manipulator trajectory of an industrial robot.
[more]
Contributed by: Frederick Wu (September 2016)
Open content licensed under CC BY-NC-SA
Snapshots
Details
References
[1] J. Denavit and R. S. Hartenberg, “A Kinematic Notation for Lower-Pair Mechanisms Based on Matrices,” Journal of Applied Mechanics, 22(2), 1955 pp. 215–221.
[2] H. Lipkin, “A Note on Denavit–Hartenberg Notation in Robotics,” in ASME 2005 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Long Beach, CA, 2005. New York: American Society of Mechanical Engineers, 2005. doi:10.1115/DETC2005-85460.
[3] J. J. Craig, Introduction to Robotics: Mechanics and Control, 3rd ed., Upper Saddle River, NJ: Pearson/Prentice Hall, 2005 pp. 62–82.
[4] B. Siciliano and O. Khatib, eds., Springer Handbook of Robotics, Berlin: Springer–Verlag, 2008.
[5] B. Siciliano, L. Sciavicco, L. Villani and G. Oriolo, Robotics: Modelling, Planning and Control, London: Springer, 2009.
[6] D. L. Pieper, “The Kinematics of Manipulators under Computer Control,” (Stanford Artificial Intelligence Laboratory Memo, No. AI-72), Ph.D. dissertation, Computer Science Department, School of Humanities and Sciences, Stanford University, CA, 1968. www.dtic.mil/cgi-bin/GetTRDoc?AD=AD0680036.
[7] M. Raghavan and B. Roth, “Kinematic Analysis of the 6R Manipulator of General Geometry,” in Proceedings of the Fifth International Symposium on Robotics Research (H. Miura, ed.), Cambridge, MA: MIT Press, 1990 pp. 263–269. dl.acm.org/citation.cfm?id=112715&CFID=542850644&CFTOKEN=11490130.
[8] D. Manocha and J. F. Canny, “Efficient Inverse Kinematics for General 6R Manipulators,” IEEE Transactions on Robotics and Automation, 10(5), 1994 pp. 648–657. doi:10.1109/70.326569.
[9] R. N. Jazar, Theory of Applied Robotics: Kinematics Dynamics and Control, 2nd ed., New York: Springer, 2010 pp. 341–363.
[10] UR10/CB3 User Manual, Version 3.1, Denmark Odense: Universal Robots A/S, 2015. (Aug 26, 2016) www.universal-robots.com/media/8755/ur10_user_manual _da _global.pdf.
[11] The URScript Programming Language, Version 3.1, Denmark Odense: Universal Robots A/S, 2015. (Aug 26, 2016) www.sysaxes.com/manuels/scriptmanual_en_ 3.1.pdf.
Permanent Citation
"Joint Space and Tooling Space for Robot Motion Control"
http://demonstrations.wolfram.com/JointSpaceAndToolingSpaceForRobotMotionControl/
Wolfram Demonstrations Project
Published: September 13 2016
 Fractal Robot Arm
Fractal Robot Arm
Sándor Kabai Robot Motion with Obstacles
Robot Motion with Obstacles
Aaron T. Becker and Haoran Zhao Forward Kinematics of Humanoid Robots
Forward Kinematics of Humanoid Robots
Frederick Wu Kinematics of a Redundant Anthropomorphic Arm with Seven Degrees of Freedom
Kinematics of a Redundant Anthropomorphic Arm with Seven Degrees of Freedom
Frederick Wu Common Robot Arm Configurations
Common Robot Arm Configurations
Mohammad Sultan and Aaron T. Becker Robot Builder
Robot Builder
Frank Liao Snake-Arm Robot
Snake-Arm Robot
Sándor Kabai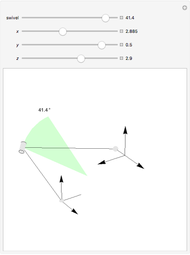 Inverse Kinematics in Redundant Robot Manipulator
Inverse Kinematics in Redundant Robot Manipulator
André Carvalho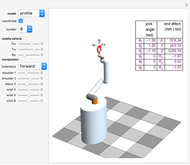 Mobile Robot with Single Manipulator
Mobile Robot with Single Manipulator
Frederick Wu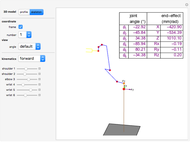 Inverse Kinematics for a Robot Manipulator with Six Degrees of Freedom
Inverse Kinematics for a Robot Manipulator with Six Degrees of Freedom
Frederick Wu
-
 Buying Watermelons Intelligently
Buying Watermelons Intelligently
Frederick Wu -
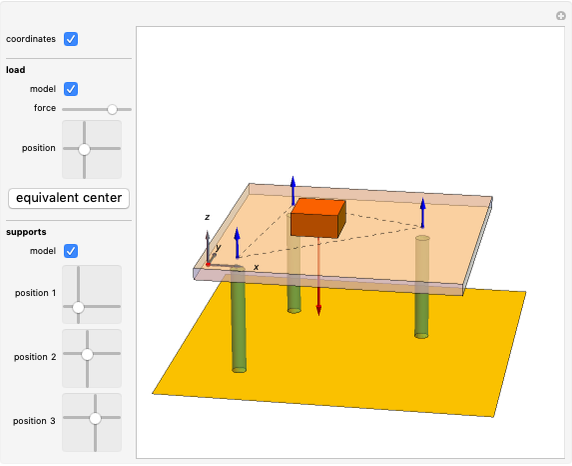 Static Equilibrium for a Plate with Support at Three Points
Static Equilibrium for a Plate with Support at Three Points
Frederick Wu -
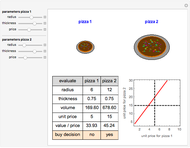 Evaluate Hot Pizza
Evaluate Hot Pizza
Frederick Wu -
 Rubik's Snake Puzzle
Rubik's Snake Puzzle
Frederick Wu -
Mobile Robot with Single Manipulator
Frederick Wu -
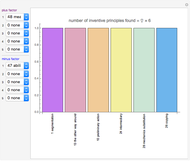 Multiple Input Parameters for TRIZ Matrix Application
Multiple Input Parameters for TRIZ Matrix Application
Frederick Wu -
 Joint Space and Tooling Space for Robot Motion Control
Joint Space and Tooling Space for Robot Motion Control
Frederick Wu -
 Trajectory Planning of Robot for Painting Art
Trajectory Planning of Robot for Painting Art
Frederick Wu -
Inverse Kinematics for a Robot Manipulator with Six Degrees of Freedom
Frederick Wu -
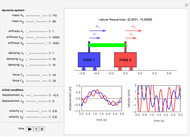 Spring-Mass-Damping System with Two Degrees of Freedom
Spring-Mass-Damping System with Two Degrees of Freedom
Frederick Wu -
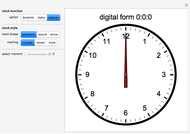 When Do the Three Hands of an Analog Clock Overlap?
When Do the Three Hands of an Analog Clock Overlap?
Frederick Wu -
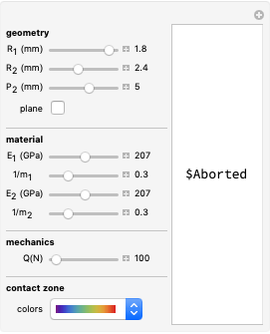 Hertzian Contact Stress
Hertzian Contact Stress
Frederick Wu -
 Launching a Rocket
Launching a Rocket
Frederick Wu -
 Kinematics of Biped Legs for Humanoid Robots
Kinematics of Biped Legs for Humanoid Robots
Frederick Wu -
 Intersection of a Convex Polyhedron and a Plane
Intersection of a Convex Polyhedron and a Plane
Frederick Wu -
Kinematics of a Redundant Anthropomorphic Arm with Seven Degrees of Freedom
Frederick Wu -
 Forward and Inverse Kinematics of the SCARA Robot
Forward and Inverse Kinematics of the SCARA Robot
Frederick Wu -
Forward Kinematics of Humanoid Robots
Frederick Wu -
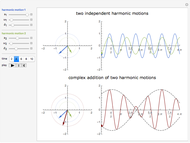 Complex Addition of Harmonic Motions and the Phenomenon of Beats
Complex Addition of Harmonic Motions and the Phenomenon of Beats
Frederick Wu -
 Shortening the 29th Olympic Torch Tour
Shortening the 29th Olympic Torch Tour
Frederick Wu