Kepler Orbits
Initializing live version




Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
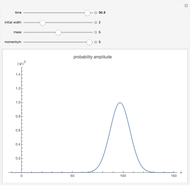
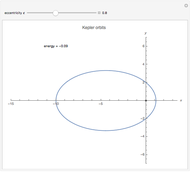
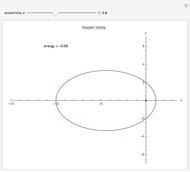
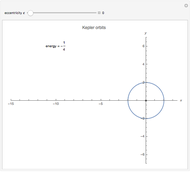
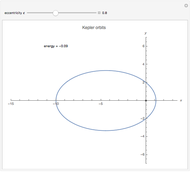
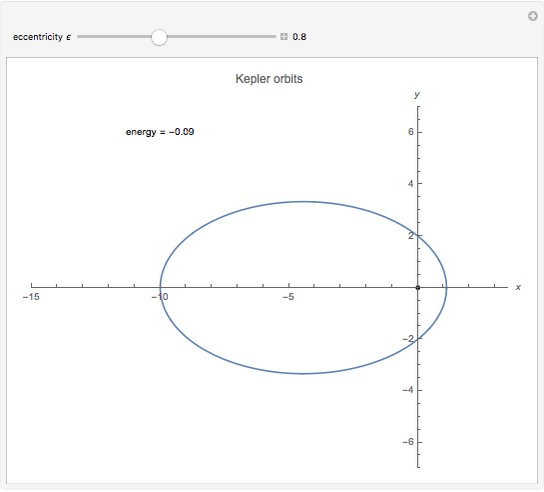
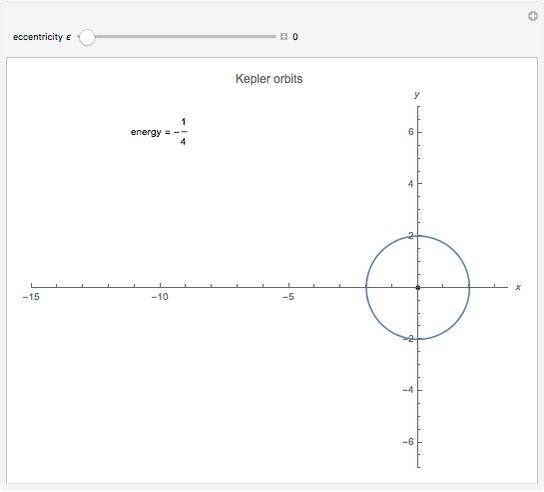
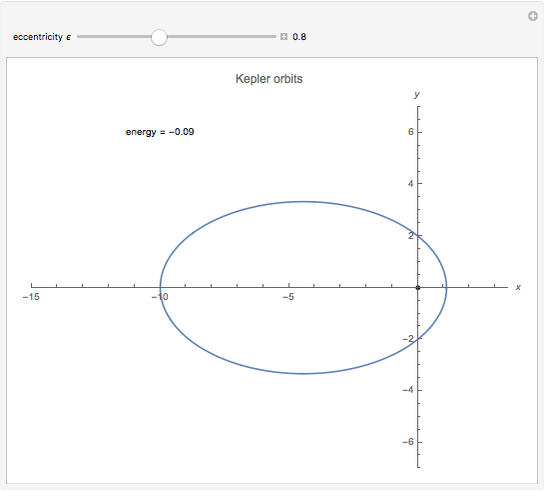
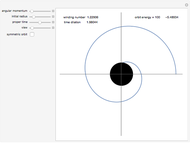
The Kepler orbits for a two-body system under a central gravitational force can be represented by a polar curve that relates the distance between the two bodies with the angle from the  axis. The shape of the orbit depends on its eccentricity, which is determined by the energy of the system.
axis. The shape of the orbit depends on its eccentricity, which is determined by the energy of the system.
Contributed by: Sarbani Chatterjee and Radhika Prasad (August 2018)
Supervised by: Nisha Rani
(Miranda House, University of Delhi)
Open content licensed under CC BY-NC-SA
Details
$FailedSnapshots
Permanent Citation
Related Demonstrations
More by Author
 Orbits around Schwarzschild Black Holes
Orbits around Schwarzschild Black Holes
David Saroff 3D Kerr Black Hole Orbits
3D Kerr Black Hole Orbits
David Saroff Orbital Resonance in the Asteroid Belt
Orbital Resonance in the Asteroid Belt
S. M. Blinder Fitting an Ellipse to the Orbit of a Star near the Galactic Center
Fitting an Ellipse to the Orbit of a Star near the Galactic Center
Weronika Lachtara and Jakub Bochinski Restricted Three-Body Problem in a Plane
Restricted Three-Body Problem in a Plane
Enrique Zeleny Estimating Planetary Perihelion Precession
Estimating Planetary Perihelion Precession
Brad Klee NEAR Shoemaker Spaceflight
NEAR Shoemaker Spaceflight
Tomas Franc Stardust-NExT Spaceflight
Stardust-NExT Spaceflight
Tomas Franc EPOXI Spaceflight
EPOXI Spaceflight
Tomas Franc Pioneer 10 and 11 Spaceflight
Pioneer 10 and 11 Spaceflight
Tomas Franc