Kinematics of a Redundant Anthropomorphic Arm with Seven Degrees of Freedom




Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
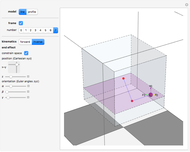
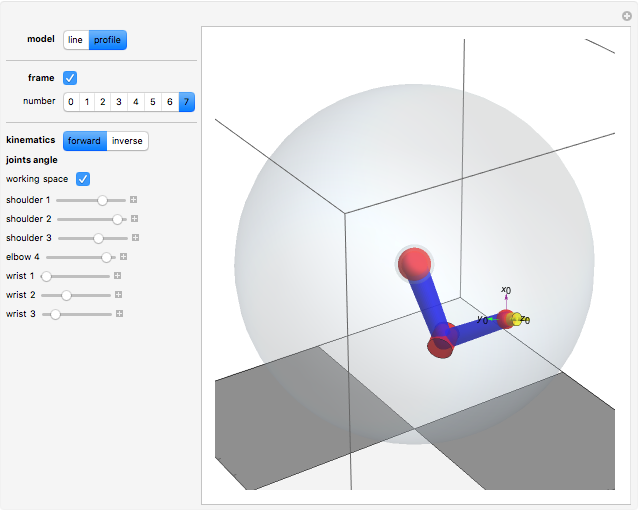
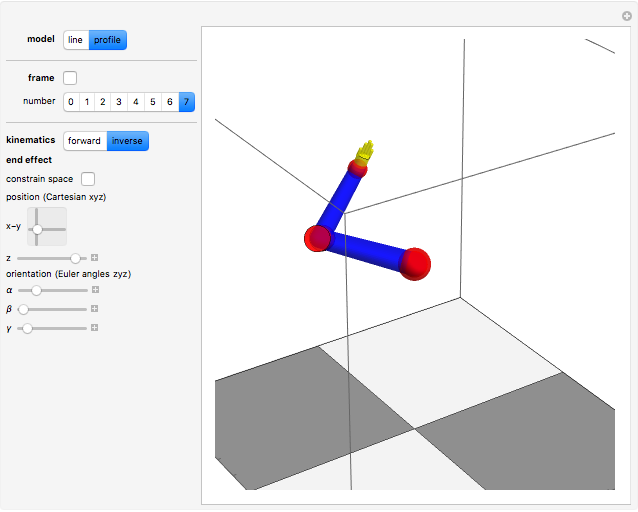
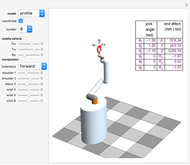
The anthropomorphic arm with seven degrees of freedom (DoF) includes redundancy, since the number of joints ( ) is greater than the dimension of the manipulation variables, which have three position coordinates and three orientation angles (
) is greater than the dimension of the manipulation variables, which have three position coordinates and three orientation angles ( ). Although the set of nonlinear trigonometric equations cannot typically be solved analytically, there are some robot structures that are solvable analytically. Pieper proposed a decoupling method [1]; the sufficient condition for solvability is when the 6-DoF robot has three consecutive revolute joints with axes intersecting in one point. Another generalized inverse is the inertiaâ€Âweighted pseudoinverse Jacobian matrix, a kind of resolved motion rate control technique, proposed by Whitney [2], which is used to minimize energy by using the inertia matrix as the weighting matrix.
). Although the set of nonlinear trigonometric equations cannot typically be solved analytically, there are some robot structures that are solvable analytically. Pieper proposed a decoupling method [1]; the sufficient condition for solvability is when the 6-DoF robot has three consecutive revolute joints with axes intersecting in one point. Another generalized inverse is the inertiaâ€Âweighted pseudoinverse Jacobian matrix, a kind of resolved motion rate control technique, proposed by Whitney [2], which is used to minimize energy by using the inertia matrix as the weighting matrix.
Contributed by: Frederick Wu (November 2014)
Open content licensed under CC BY-NC-SA
Snapshots
Details
References
[1] D. L. Pieper, "The Kinematics of Manipulators under Computer Control," (Stanford Artificial Intelligence Laboratory Memo, No. AI-72), Ph.D. dissertation, Computer Science Department, School of Humanities and Sciences, Stanford University, CA, 1968. www.dtic.mil/cgi-bin/GetTRDoc?AD=AD0680036.
[2] D. E. Whitney, "Resolved Motion Rate Control of Manipulators and Human Prostheses," IEEE Transactions on Man-Machine Systems, 10(2), 1969 pp. 47–53. doi:10.1109/TMMS.1969.299896.
[3] B. Siciliano, L. Sciavicco, L. Villani, and G. Oriolo, Robotics: Modelling, Planning and Control, London: Springer-Verlag, 2009 pp. 39–160.
[4] R. N. Jazar, Theory of Applied Robotics: Kinematics, Dynamics, and Control, 2nd ed., New York: Springer-Verlag, 2010 pp. 357–363.
 Forward Kinematics of Humanoid Robots
Forward Kinematics of Humanoid Robots
Frederick Wu Inverse Kinematics in Redundant Robot Manipulator
Inverse Kinematics in Redundant Robot Manipulator
André Carvalho Joint Space and Tooling Space for Robot Motion Control
Joint Space and Tooling Space for Robot Motion Control
Frederick Wu Common Robot Arm Configurations
Common Robot Arm Configurations
Mohammad Sultan and Aaron T. Becker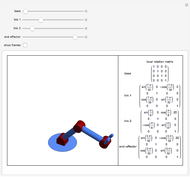 Forward Kinematics
Forward Kinematics
Rob Lockhart Inverse Kinematics
Inverse Kinematics
Rob Lockhart Snake-Arm Robot
Snake-Arm Robot
Sándor Kabai Fractal Robot Arm
Fractal Robot Arm
Sándor Kabai Inverse Kinematics for a Robot Manipulator with Six Degrees of Freedom
Inverse Kinematics for a Robot Manipulator with Six Degrees of Freedom
Frederick Wu Probabilistic Models for Robot Motion
Probabilistic Models for Robot Motion
Aaron T. Becker and Renuka Pakeetharan
-
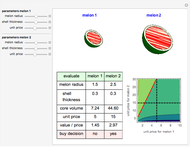 Buying Watermelons Intelligently
Buying Watermelons Intelligently
Frederick Wu -
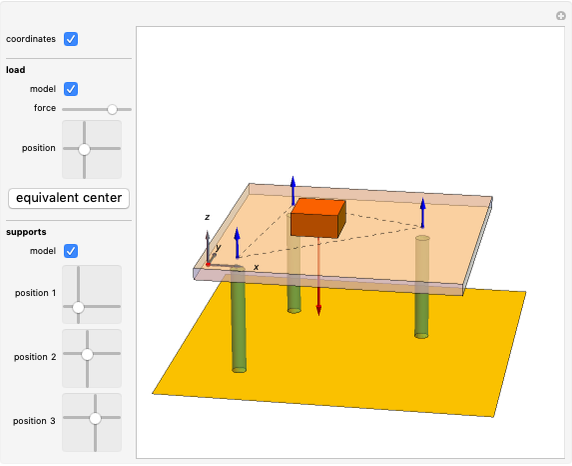 Static Equilibrium for a Plate with Support at Three Points
Static Equilibrium for a Plate with Support at Three Points
Frederick Wu -
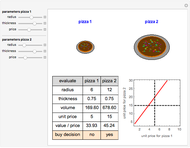 Evaluate Hot Pizza
Evaluate Hot Pizza
Frederick Wu -
 Rubik's Snake Puzzle
Rubik's Snake Puzzle
Frederick Wu -
 Mobile Robot with Single Manipulator
Mobile Robot with Single Manipulator
Frederick Wu -
 Multiple Input Parameters for TRIZ Matrix Application
Multiple Input Parameters for TRIZ Matrix Application
Frederick Wu -
Joint Space and Tooling Space for Robot Motion Control
Frederick Wu -
 Trajectory Planning of Robot for Painting Art
Trajectory Planning of Robot for Painting Art
Frederick Wu -
Inverse Kinematics for a Robot Manipulator with Six Degrees of Freedom
Frederick Wu -
 Spring-Mass-Damping System with Two Degrees of Freedom
Spring-Mass-Damping System with Two Degrees of Freedom
Frederick Wu -
 When Do the Three Hands of an Analog Clock Overlap?
When Do the Three Hands of an Analog Clock Overlap?
Frederick Wu -
 Hertzian Contact Stress
Hertzian Contact Stress
Frederick Wu -
 Launching a Rocket
Launching a Rocket
Frederick Wu -
 Kinematics of Biped Legs for Humanoid Robots
Kinematics of Biped Legs for Humanoid Robots
Frederick Wu -
 Intersection of a Convex Polyhedron and a Plane
Intersection of a Convex Polyhedron and a Plane
Frederick Wu -
 Kinematics of a Redundant Anthropomorphic Arm with Seven Degrees of Freedom
Kinematics of a Redundant Anthropomorphic Arm with Seven Degrees of Freedom
Frederick Wu -
 Forward and Inverse Kinematics of the SCARA Robot
Forward and Inverse Kinematics of the SCARA Robot
Frederick Wu -
Forward Kinematics of Humanoid Robots
Frederick Wu -
 Complex Addition of Harmonic Motions and the Phenomenon of Beats
Complex Addition of Harmonic Motions and the Phenomenon of Beats
Frederick Wu -
 Shortening the 29th Olympic Torch Tour
Shortening the 29th Olympic Torch Tour
Frederick Wu