Kraskov (KSG) Estimator of Mutual Information

Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
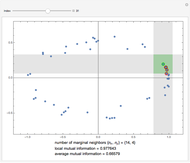
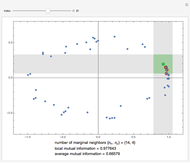
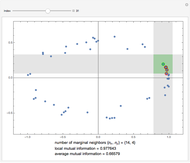
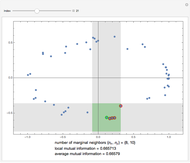
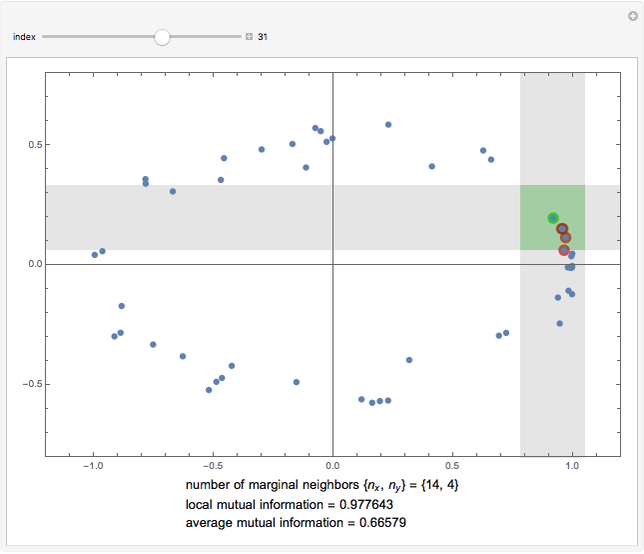
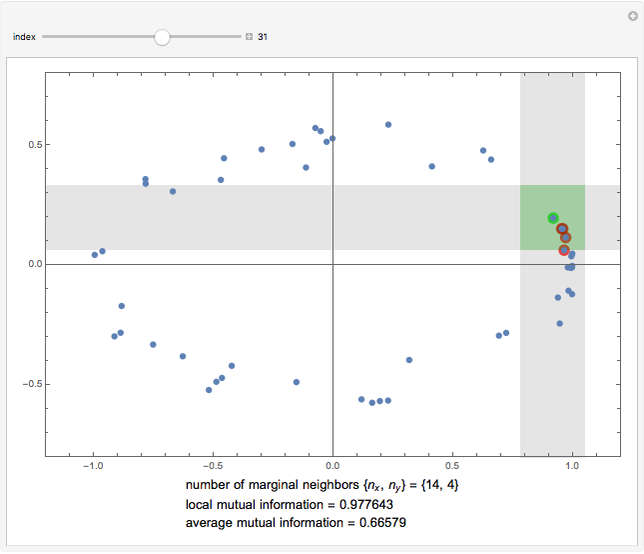
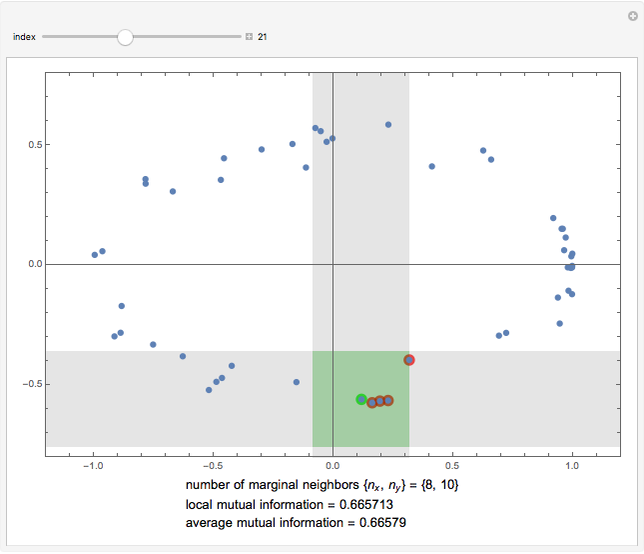
This Demonstration illustrates the operation of the Kraskov–Stögbauer–Grassberger (KSG) estimator [1] of mutual information on a small dataset with a nonlinear dependence structure, which cannot be captured by the Pearson correlation coefficient.
[more]









Contributed by: Leonardo Novelli (August 2018)
Open content licensed under CC BY-NC-SA
Details
References
[1] A. Kraskov, H. Stögbauer and P. Grassberger, "Estimating Mutual Information," Physical Review E, 69(6), 2004. doi:10.1103/PhysRevE.69.066138.
[2] J. T. Lizier, "JIDT: An Information-Theoretic Toolkit for Studying the Dynamics of Complex Systems," Frontiers in Robotics and AI, 1, 2014. doi:10.3389/frobt.2014.00011.
Snapshots
Permanent Citation
 Basic Performance Measures for Information Retrieval
Basic Performance Measures for Information Retrieval
Giovanna Roda Comparing Information Retrieval Evaluation Measures
Comparing Information Retrieval Evaluation Measures
Giovanna Roda The Precision-Recall Curve in Information Retrieval Evaluation
The Precision-Recall Curve in Information Retrieval Evaluation
Giovanna Roda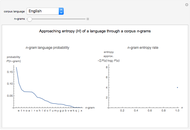 Prediction and Entropy of Languages
Prediction and Entropy of Languages
Hector Zenil and Elena Villarreal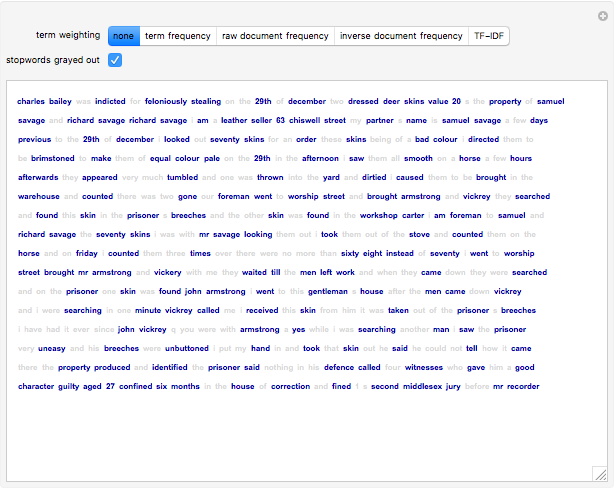 Term Weighting with TF-IDF
Term Weighting with TF-IDF
William J. Turkel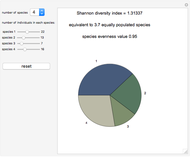 Shannon Diversity Index in Population Ecology
Shannon Diversity Index in Population Ecology
Kathy Wang Huffman Encoding
Huffman Encoding
Abigail Nussey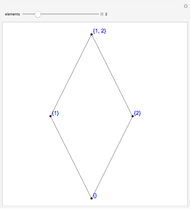 Hasse Diagram of Power Sets
Hasse Diagram of Power Sets
Anthony Pasqualoni Mutual Information between Boolean Net Regions
Mutual Information between Boolean Net Regions
Tommaso Bolognesi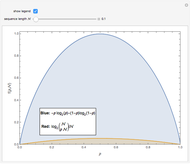 A Limit Theorem from Information Theory
A Limit Theorem from Information Theory
John Custy