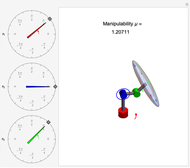
Manipulability Ellipsoid of a Robot Arm



Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
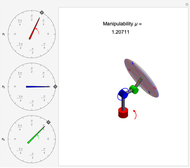
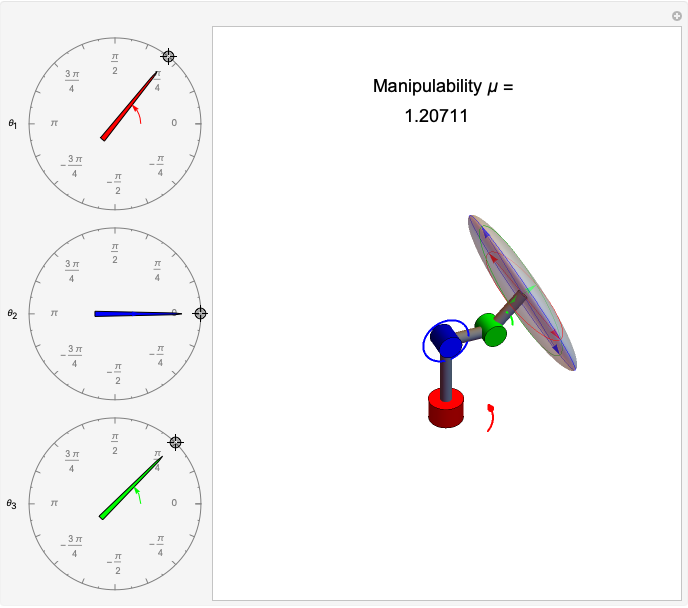
Manipulability of a robot is the capacity to change the end effector's position as a function of the joint configuration [1]. A larger manipulability measure indicates a greater range of possible motions at that configuration. The manipulability measure reduces to zero when the robot is in a singular configuration and cannot generate velocities in at least one direction.
[more]
Contributed by: Aaron T. Becker and Mary Burbage (June 2016)
Open content licensed under CC BY-NC-SA
Snapshots
Details
Calculating the manipulability requires defining the robot configuration in terms of joint angles (forward kinematics) and then calculating how joint velocities generate velocity of the end effector (velocity kinematics).
The configuration is defined using transformation matrices derived using the Denavit–Hartenberg convention. The three joints of the elbow manipulator allow three positional degrees of freedom, and the location (origin) of each joint is determined from these transformation matrices. These origins are combined with the axes of rotation from the same transformation matrices to develop the velocity Jacobian, which relates the end effector velocity to the rate of change in the joint positions. The velocity Jacobian  used in this Demonstration is given in [2, eq. 4.98, p. 144]. It is a function of the rotational position of each of the three joints, described by the variables
used in this Demonstration is given in [2, eq. 4.98, p. 144]. It is a function of the rotational position of each of the three joints, described by the variables  ,
,  , and
, and  .
.
The velocity Jacobian is  ,
,
where  is shorthand for
is shorthand for  ,
,  is shorthand for
is shorthand for  , and so on, and the lengths of links 2 and 3 are
, and so on, and the lengths of links 2 and 3 are  and
and  .
.
The manipulability measure is calculated as the product of the diagonal elements  in the
in the  matrix that results from the singular value decomposition of the velocity Jacobian,
matrix that results from the singular value decomposition of the velocity Jacobian,  . It may also be defined relative to the determinant of the Jacobian as
. It may also be defined relative to the determinant of the Jacobian as  . From this definition, it is clear that
. From this definition, it is clear that  when the determinant of the Jacobian is zero. This occurs when the manipulator is in a singular configuration. The determinant of the Jacobian is
when the determinant of the Jacobian is zero. This occurs when the manipulator is in a singular configuration. The determinant of the Jacobian is  . When the elbow manipulator is in the configuration
. When the elbow manipulator is in the configuration  ,
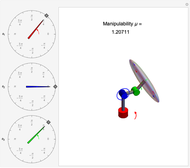
,  , the Jacobian has rank 2, and the three-dimensional ellipsoid flattens to a two-dimensional ellipse. At the configuration
, the Jacobian has rank 2, and the three-dimensional ellipsoid flattens to a two-dimensional ellipse. At the configuration  ,
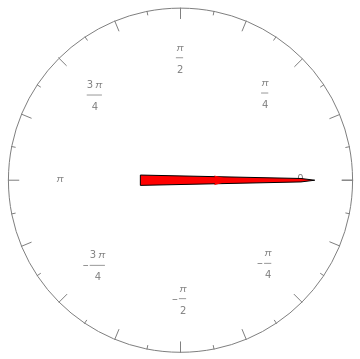
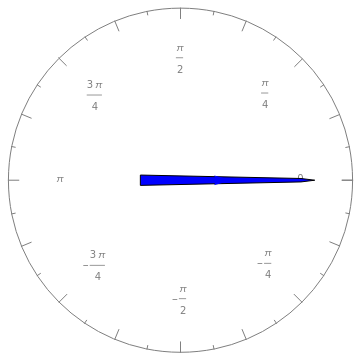
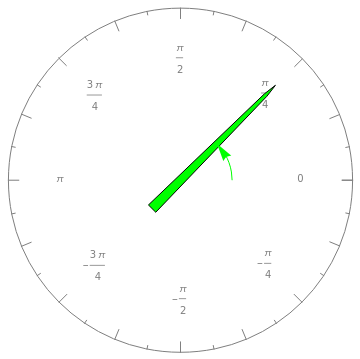
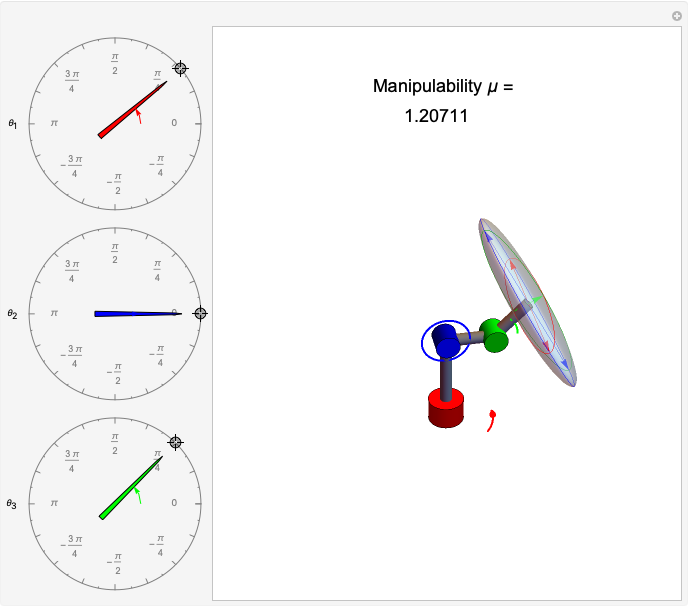
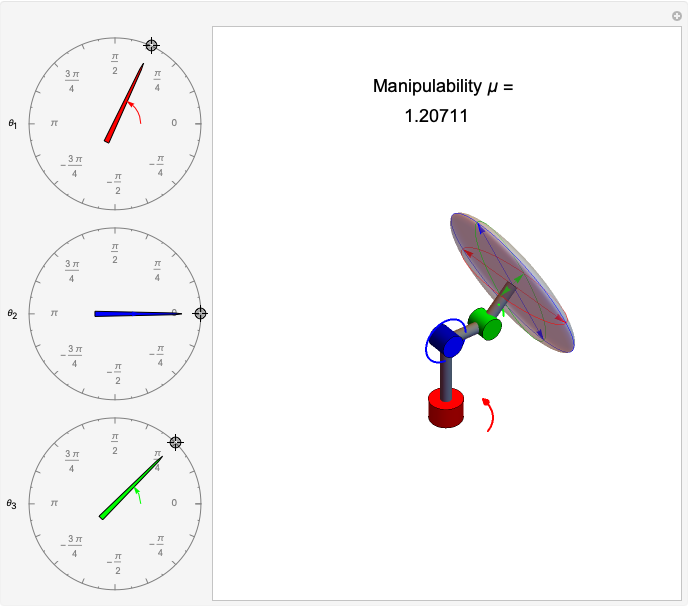
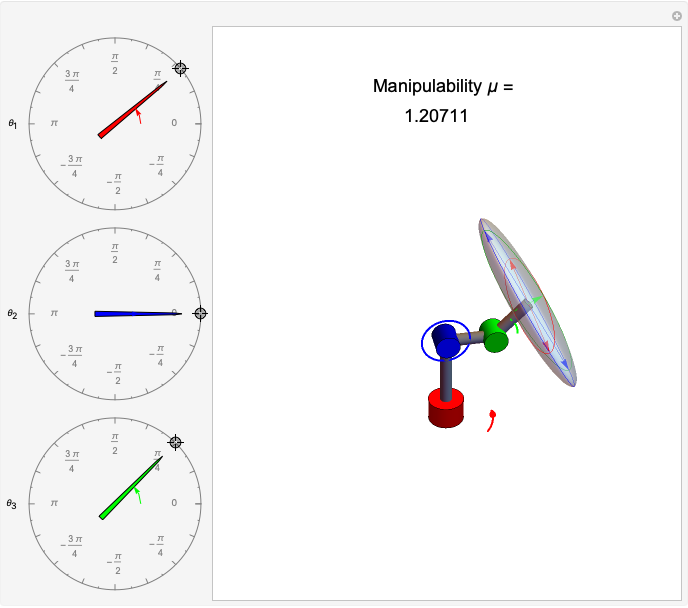
,  , the Jacobian has rank 1, and the ellipsoid collapses to a line. Snapshot 1 gives a three-dimensional ellipse, snapshot 2 a two-dimensional ellipse, and snapshot 3 a one-dimensional ellipse.
, the Jacobian has rank 1, and the ellipsoid collapses to a line. Snapshot 1 gives a three-dimensional ellipse, snapshot 2 a two-dimensional ellipse, and snapshot 3 a one-dimensional ellipse.
References
[1] J. Martinez, "Manipulability Ellipsoids in Robotics," Engineer JAU (blog). (May 26, 2016) engineerjau.wordpress.com/2013/05/04/advanced-robotics-manipulability-ellipsoids.
[2] M. W. Spong, S. Hutchinson, and M. Vidyasagar, Robot Modeling and Control, Hoboken, NJ: John Wiley and Sons, 2006.
Permanent Citation
 Robot Singularities in Three-Link Manipulators
Robot Singularities in Three-Link Manipulators
Aaron T. Becker and Yitong Lu Common Robot Arm Configurations
Common Robot Arm Configurations
Mohammad Sultan and Aaron T. Becker Robot Manipulator Workspaces
Robot Manipulator Workspaces
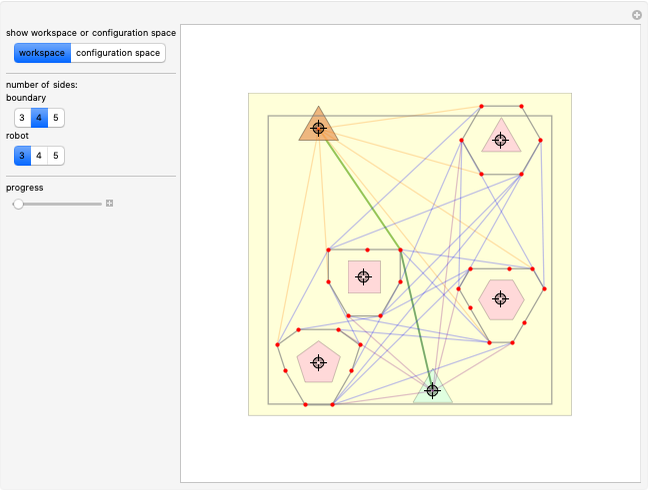
Aaron T. Becker, Benedict Isichei, Muhammad Sultan and Maruthi S. Chemudupati Probabilistic Roadmap Method for Robot Arm
Probabilistic Roadmap Method for Robot Arm
Aaron T. Becker and Yitong Lu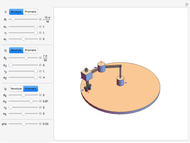 Denavit-Hartenberg Parameters for a Three-Link Robot
Denavit-Hartenberg Parameters for a Three-Link Robot
Aaron T. Becker and Mary Burbage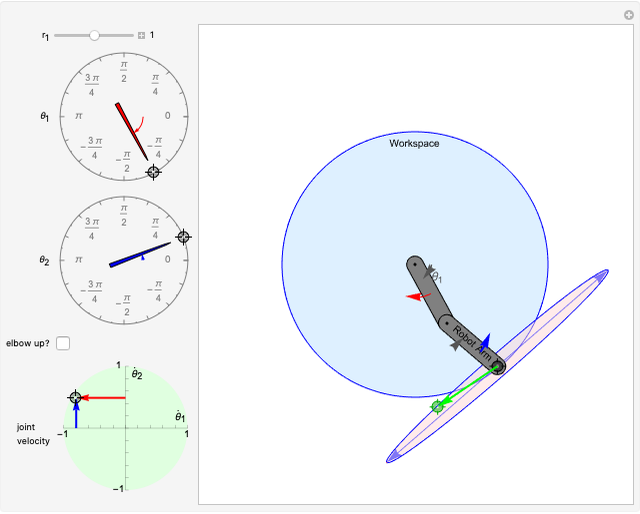 Forward and Inverse Kinematics for Two-Link Arm
Forward and Inverse Kinematics for Two-Link Arm
Aaron T. Becker and Lillian Lin Robot Motion with Obstacles
Robot Motion with Obstacles
Aaron T. Becker and Haoran Zhao Breadth-First Search Robot Motion Planning
Breadth-First Search Robot Motion Planning
Aaron T. Becker, Benedict Isichei and Praveen Reddy Padala Probabilistic Models for Robot Motion
Probabilistic Models for Robot Motion
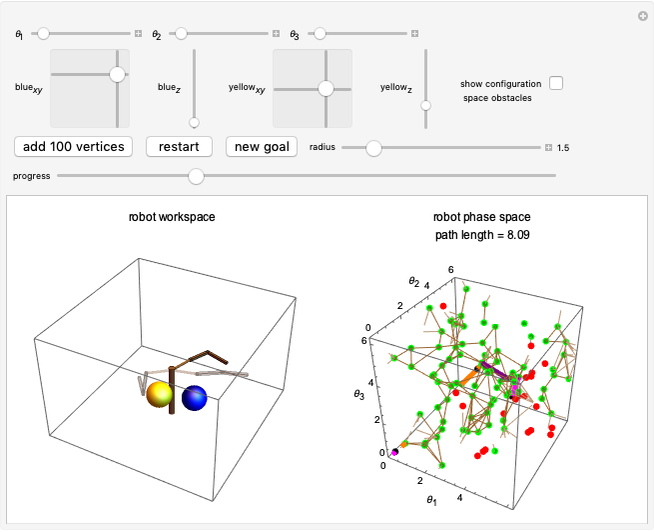
Aaron T. Becker and Renuka Pakeetharan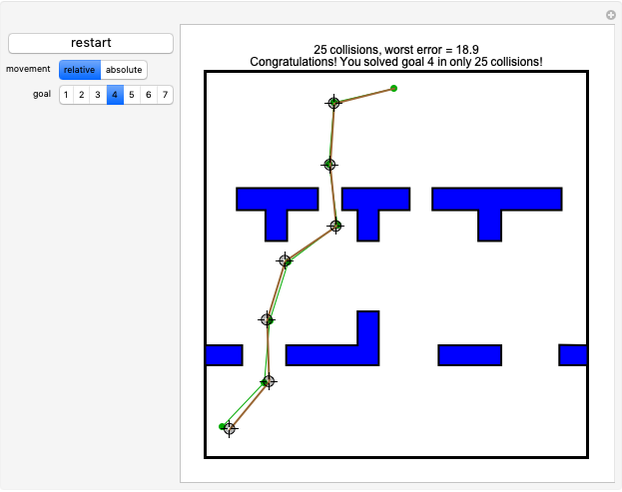 Probabilistic Roadmap Method with Seven-Link Articulated Robot
Probabilistic Roadmap Method with Seven-Link Articulated Robot
Aaron T. Becker and Yitong Lu
-
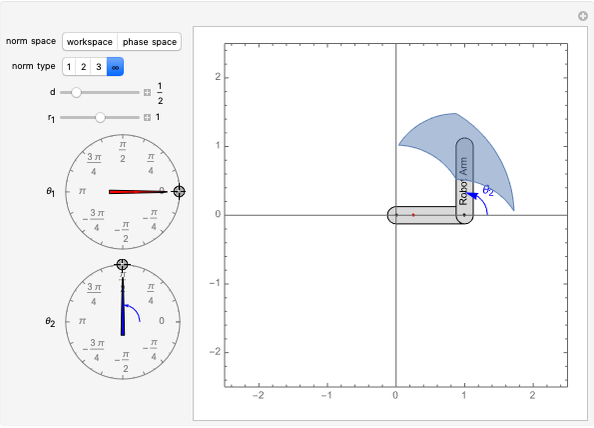 Distance Norms in Robot Workspace and Phase Space
Distance Norms in Robot Workspace and Phase Space
Aaron T. Becker -
Forward and Inverse Kinematics for Two-Link Arm
Aaron T. Becker -
 Manipulability Ellipsoid of a Robot Arm
Manipulability Ellipsoid of a Robot Arm
Aaron T. Becker -
 Projected Area of a Cuboid
Projected Area of a Cuboid
Aaron T. Becker -
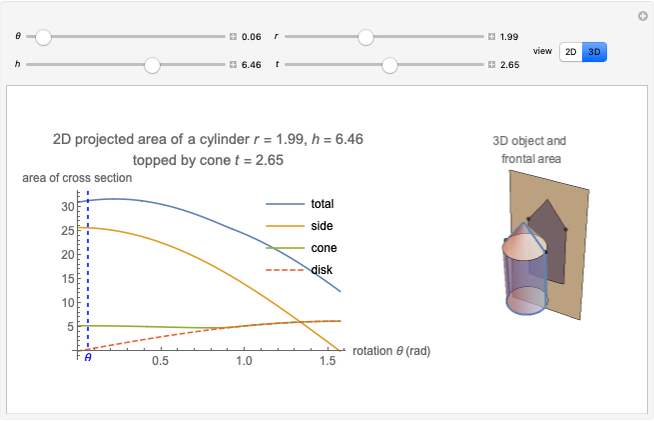 Projected Areas of Cylinder and Cone
Projected Areas of Cylinder and Cone
Aaron T. Becker -
Robot Singularities in Three-Link Manipulators
Aaron T. Becker -
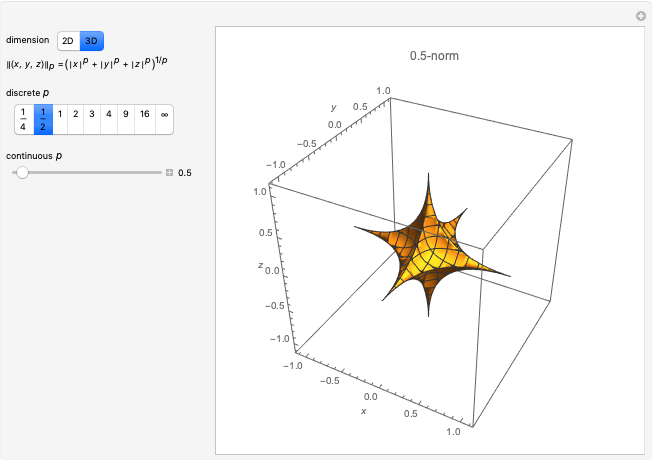 Unit Balls for Different p-Norms in 2D and 3D
Unit Balls for Different p-Norms in 2D and 3D
Aaron T. Becker -
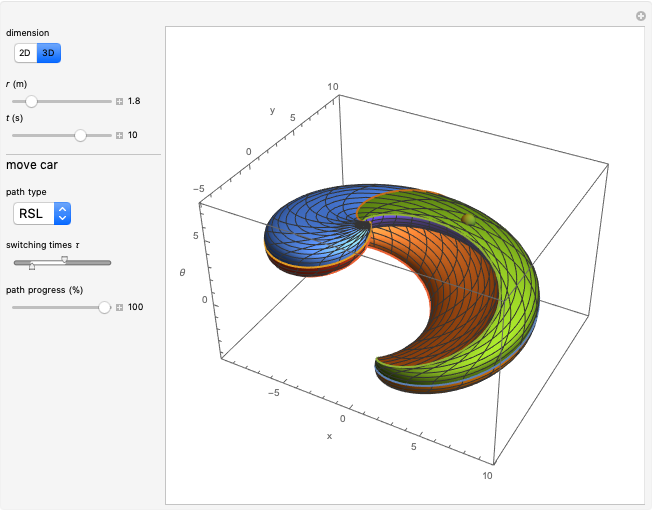 3D Reachability Set for a Dubins Car
3D Reachability Set for a Dubins Car
Aaron T. Becker -
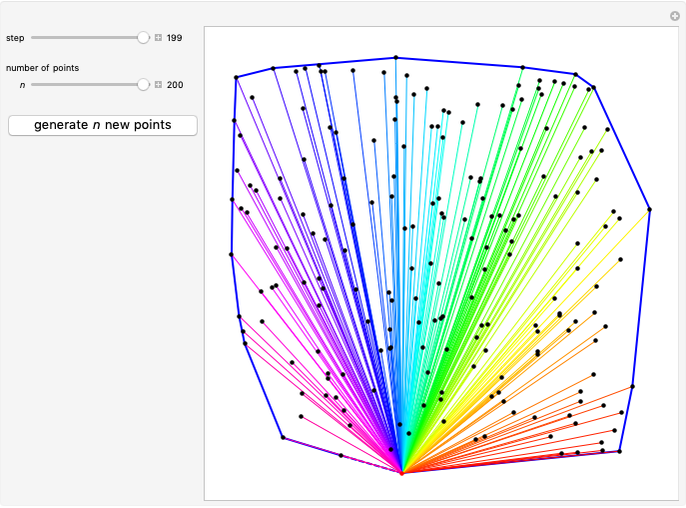 Graham Scan to Find the Convex Hull of a Set of Points in 2D
Graham Scan to Find the Convex Hull of a Set of Points in 2D
Aaron T. Becker -
 Motion Planning for Robot Path around Obstacles
Motion Planning for Robot Path around Obstacles
Aaron T. Becker -
Probabilistic Roadmap Method with Seven-Link Articulated Robot
Aaron T. Becker -
 Probabilistic Roadmap Method in 3D
Probabilistic Roadmap Method in 3D
Aaron T. Becker -
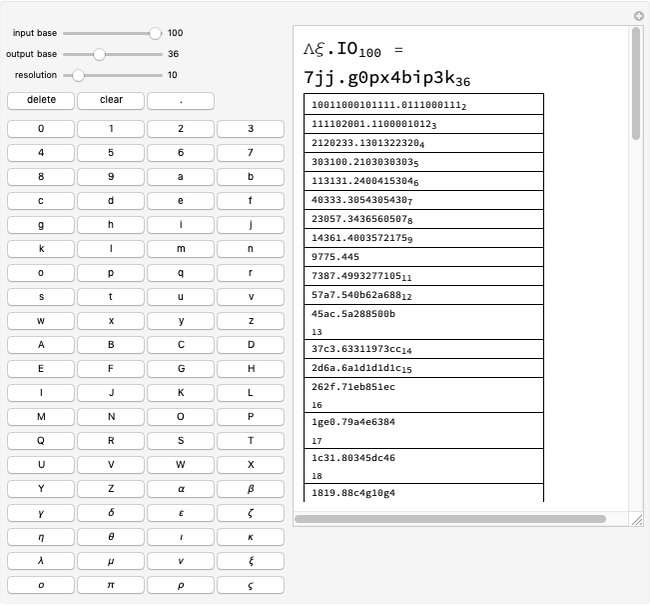 Base Conversions from Base 2 through 100 Using Radix Points
Base Conversions from Base 2 through 100 Using Radix Points
Aaron T. Becker -
Probabilistic Roadmap Method for Robot Arm
Aaron T. Becker -
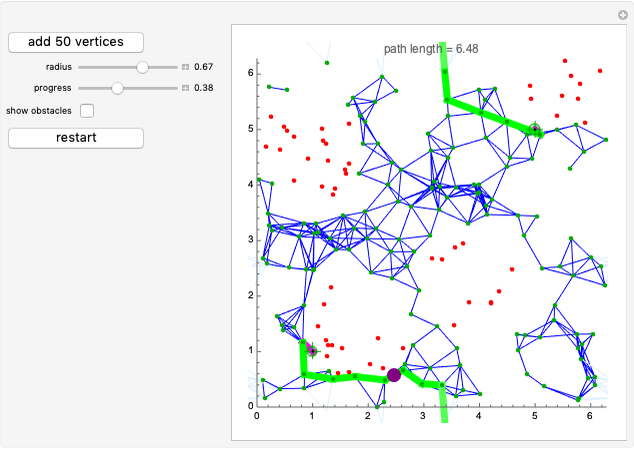 Probabilistic Roadmap Method
Probabilistic Roadmap Method
Aaron T. Becker -
Robot Manipulator Workspaces
Aaron T. Becker -
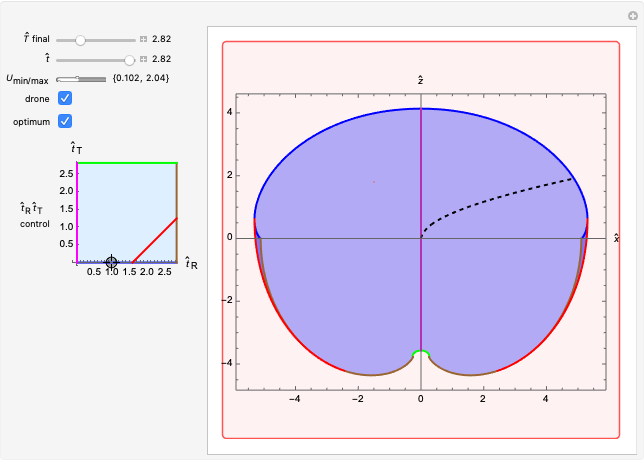 Reachable Set for a Drone
Reachable Set for a Drone
Aaron T. Becker -
 Smallest Circle Problem
Smallest Circle Problem
Aaron T. Becker -
 Art Gallery Problem
Art Gallery Problem
Aaron T. Becker -
 Visibility Region of a Polygon
Visibility Region of a Polygon
Aaron T. Becker