Maximizing Apparent Velocity in a Camera's Frame




Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
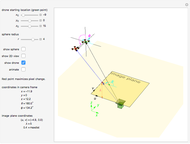
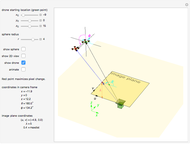
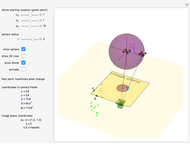
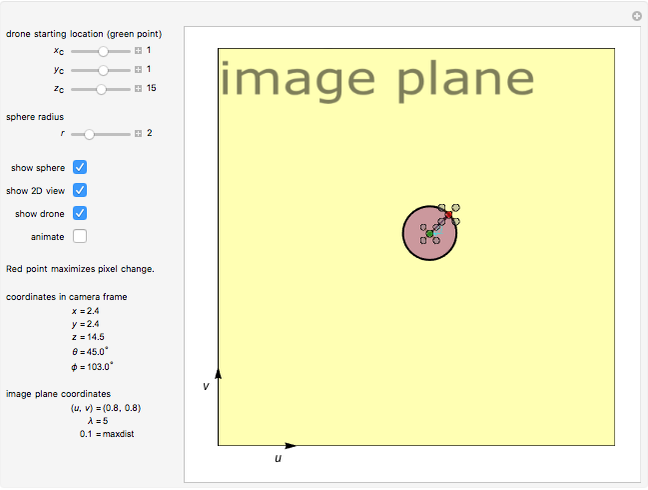
How should a drone move to maximize its apparent velocity in the frame of a camera? This Demonstration solves this problem for a drone that can move a distance  in any direction.
in any direction.
Contributed by: Mohammad Sultan and Aaron T. Becker (November 2018)
Open content licensed under CC BY-NC-SA
Details
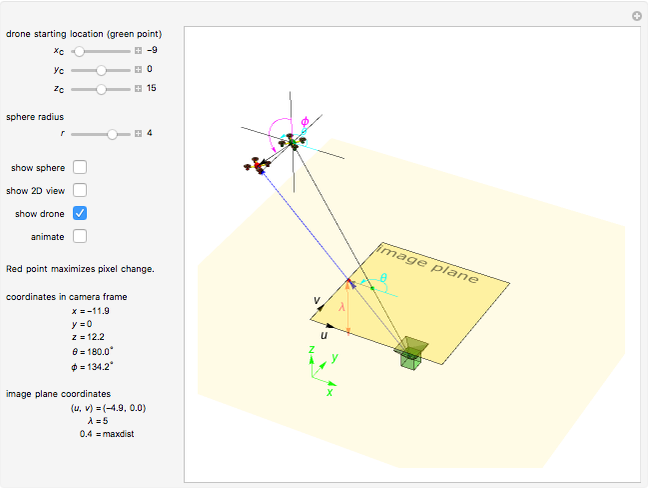
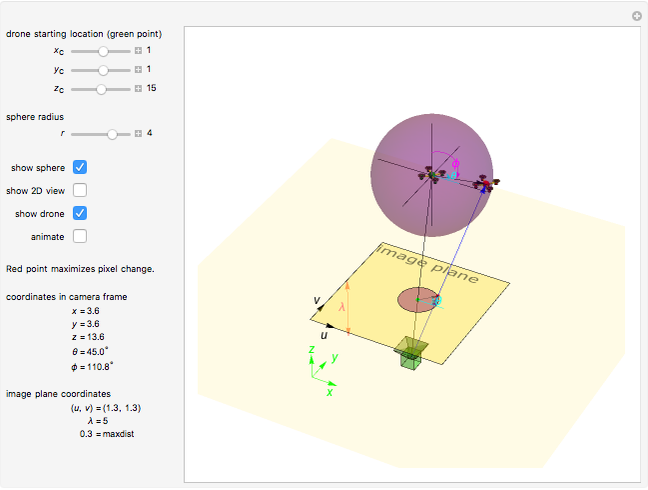
If a drone (represented as a particle) can move with equal velocity in any direction, the set of possible 3D coordinates after one time step is a 3D sphere. The image plane of a camera projects all 3D points into a 2D camera frame [1]. If the sphere is centered at  with radius
with radius  and camera focal length
and camera focal length  , then the optimal goal location
, then the optimal goal location  for the drone is parameterized by the (latitude, longitude) pair
for the drone is parameterized by the (latitude, longitude) pair  :
:
 ,
,
 .
.
If  is
is  , there are infinite solutions with
, there are infinite solutions with  .
.
The goal location is:



This projects onto the image plane at the point  . Because
. Because  is always negative, the drone decreases the distance in
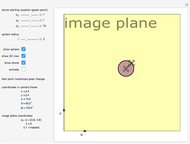
is always negative, the drone decreases the distance in  . Interestingly, the sphere projects into a 2D ellipse in the image plane. With equations given by [2], the ellipse is centered at
. Interestingly, the sphere projects into a 2D ellipse in the image plane. With equations given by [2], the ellipse is centered at
 ,
,
with
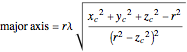 ,
,
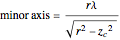
and
 .
.
The focal length  is 5 in this Demonstration.
is 5 in this Demonstration.
Snapshot 1:  ,
,  ,
,  and
and 
Snapshot 2: 2D view when  ,
,  ,
,  and
and 
Snapshot 3:  ,
,  ,
,  and
and  with "show drone" turned off
with "show drone" turned off
Snapshot 4: 2D view when  ,
,  ,
,  and
and  with "show sphere" turned off
with "show sphere" turned off
Snapshot 5:  ,
,  ,
,  and
and 
Snapshot 6:  ,
,  ,
,  and
and  with "show drone" turned off
with "show drone" turned off
Snapshot 7: 2D view when  ,
,  ,
,  and
and 
References
[1] M. W. Spong, S. Hutchinson and M. Vidyasagar, Robot Modeling and Control, Hoboken, NJ: John Wiley and Sons, 2006.
[2] D. Eberly. "Perspective Projection of an Ellipsoid." (Oct 30, 2018) www.geometrictools.com/Documentation/PerspectiveProjectionEllipsoid.pdf.
Snapshots
Permanent Citation
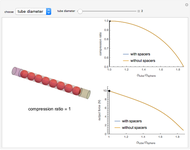 Transmitting Force through a Tube Filled with Spheres and Spacers
Transmitting Force through a Tube Filled with Spheres and Spacers
Haoran Zhao and Aaron T. Becker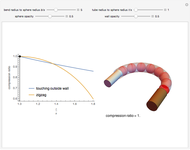 Compression Ratio of Spheres in a Curved Tube
Compression Ratio of Spheres in a Curved Tube
Aaron T. Becker, Haoran Zhao and Li Huang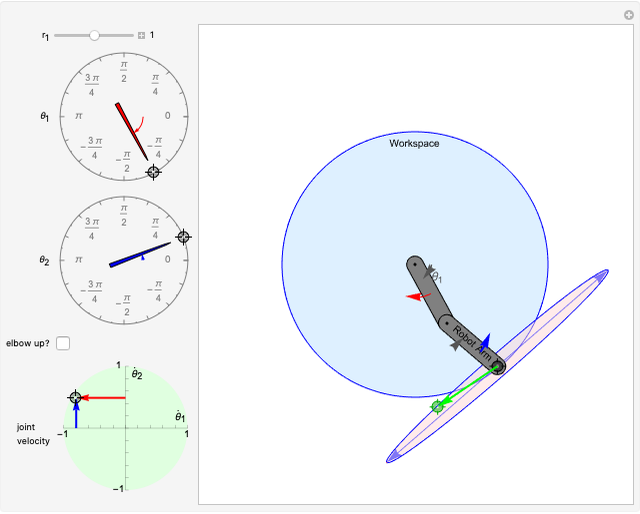 Forward and Inverse Kinematics for Two-Link Arm
Forward and Inverse Kinematics for Two-Link Arm
Aaron T. Becker and Lillian Lin Denavit-Hartenberg Parameters for a Three-Link Robot
Denavit-Hartenberg Parameters for a Three-Link Robot
Aaron T. Becker and Mary Burbage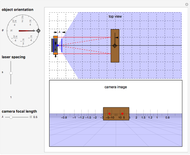 Measuring Distance and Orientation Using Camera and Lasers
Measuring Distance and Orientation Using Camera and Lasers
Shiva Shahrokhi and Aaron T. Becker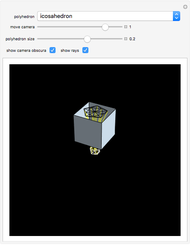 Camera Obscura
Camera Obscura
Izidor Hafner Common Robot Arm Configurations
Common Robot Arm Configurations
Mohammad Sultan and Aaron T. Becker Robot Manipulator Workspaces
Robot Manipulator Workspaces
Aaron T. Becker, Benedict Isichei, Muhammad Sultan and Maruthi S. Chemudupati Mobile Robot with Single Manipulator
Mobile Robot with Single Manipulator
Frederick Wu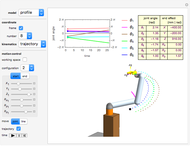 Joint Space and Tooling Space for Robot Motion Control
Joint Space and Tooling Space for Robot Motion Control
Frederick Wu