Micro-Doppler Sonar Simulation



Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
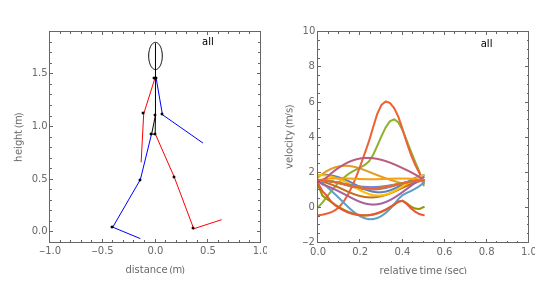
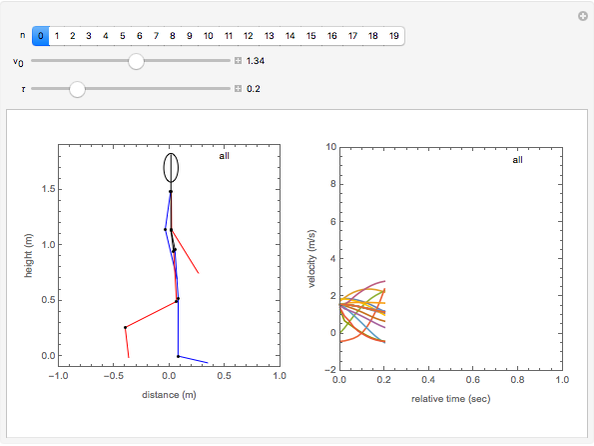
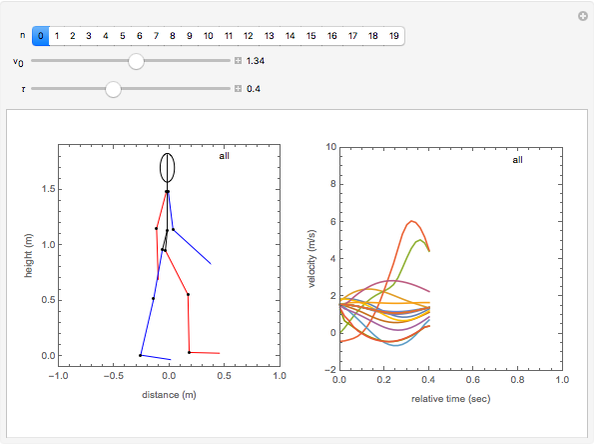
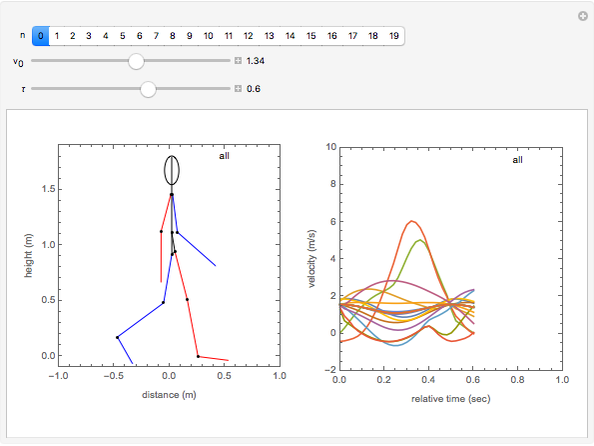
When walking toward an ultrasonic sonar, a person generates a Doppler signature in the same way that a car does when it moves toward a traffic enforcement radar. Because we each swing our arms, legs, and torso in a unique way as we walk, micro-Doppler sonar data can be used for human recognition and detection. This Demonstration simulates the response of a micro-Doppler sonar to the motion of 19 key body parts as a person walks toward the sonar. The human motion portion of the simulation is based on [1].
Contributed by: Marshall Bradley (March 2011)
Open content licensed under CC BY-NC-SA
Snapshots
Details
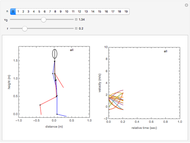
Use the setter bar in the Demonstration to select the body part for which velocity is calculated. In the left-hand graph the selected body part will be highlighted in yellow. The right leg and arm are shown in red. The left leg and arm are shown in blue. The velocity of the body part is shown in the right-hand graph. Choosing  results in the selection of all 19 body parts for the velocity computation.
results in the selection of all 19 body parts for the velocity computation.
The lower two buttons control the velocity  (m/s) of the walker and the relative time
(m/s) of the walker and the relative time  (sec) in the walk cycle. As
(sec) in the walk cycle. As  varies from 0 to 1, the individual takes two steps. By varying
varies from 0 to 1, the individual takes two steps. By varying  the individual can be made to "walk". The simulation assumes that the individual is six feet tall.
the individual can be made to "walk". The simulation assumes that the individual is six feet tall.
[1] R. Boulic, N. Thalmann, and D. Thalmann, "A Global Human Walking Model with Real-Time Kinematic Personification," Visual Computer 6(6), 1990, pp. 344–358.
[2] M. Bradley, "A Mathematical Implementation of 'A Global Human Walking Model with Real-Time Kinematic Personification' by Boulic, Thalmann and Thalmann," Human, Light Vehicle and Tunnel Detection Workshop, June 16–17, 2009.
Permanent Citation
 Human Walking Animation
Human Walking Animation
Marshall Bradley High-Frequency Sonar Performance
High-Frequency Sonar Performance
Marshall Bradley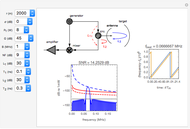 Frequency-Modulated Continuous-Wave (FMCW) Radar
Frequency-Modulated Continuous-Wave (FMCW) Radar
Marshall Bradley Uncertainty in Sonar Performance Prediction
Uncertainty in Sonar Performance Prediction
Marshall Bradley Bayesian Range Weighting for Sonar
Bayesian Range Weighting for Sonar
Marshall Bradley Sonar
Sonar
Enrique Zeleny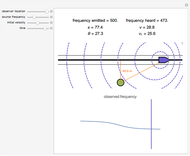 The Doppler Effect
The Doppler Effect
Alan Joyce Solving the Cable Equation
Solving the Cable Equation
Garrett Neske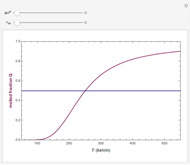 Two-State Protein Melting Curve (N, P, T Ensemble)
Two-State Protein Melting Curve (N, P, T Ensemble)
David L. Pincus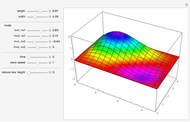 Vibrations of a Rectangular Membrane
Vibrations of a Rectangular Membrane
Alain Goriely
-
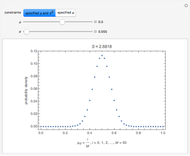
 Bayesian Distribution of Sample Mean
Bayesian Distribution of Sample Mean
Marshall Bradley -
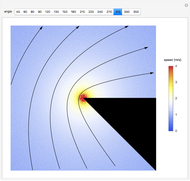 Fluid Flow around a Corner
Fluid Flow around a Corner
Marshall Bradley -
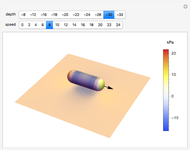 Underwater Vehicle Pressure Signature
Underwater Vehicle Pressure Signature
Marshall Bradley -
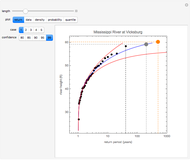 Extreme Value Forecasting
Extreme Value Forecasting
Marshall Bradley -
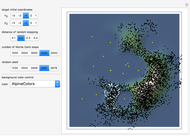 Target Motion with the Metropolis-Hastings Algorithm
Target Motion with the Metropolis-Hastings Algorithm
Marshall Bradley -
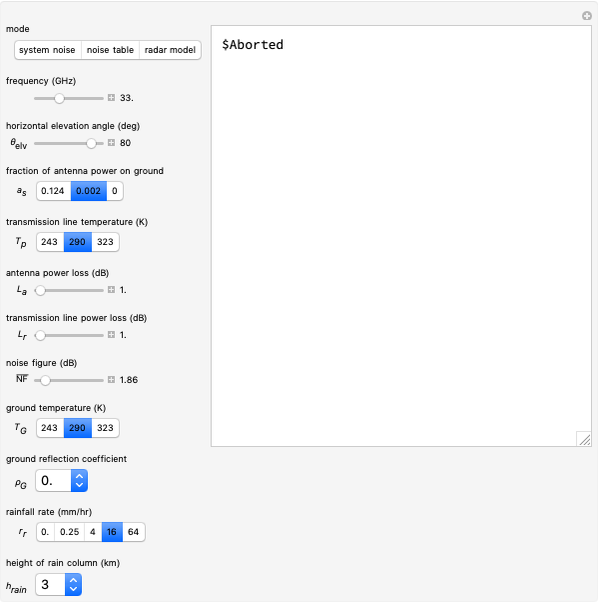 Noise Temperature of a Radar System
Noise Temperature of a Radar System
Marshall Bradley -
High-Frequency Sonar Performance
Marshall Bradley -
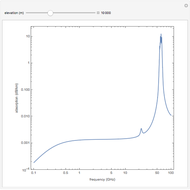 Atmospheric Radar Wave Absorption
Atmospheric Radar Wave Absorption
Marshall Bradley -
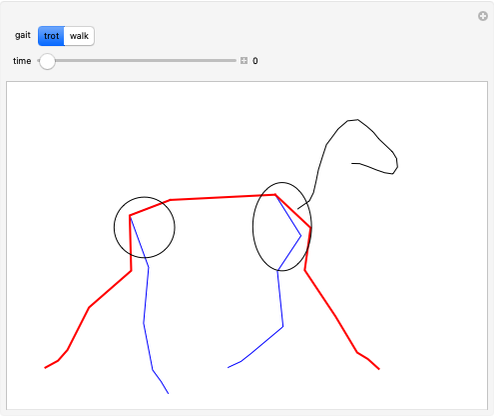 Equine Motion
Equine Motion
Marshall Bradley -
Frequency-Modulated Continuous-Wave (FMCW) Radar
Marshall Bradley -
 Maximum Entropy Probability Density Functions
Maximum Entropy Probability Density Functions
Marshall Bradley -
Uncertainty in Sonar Performance Prediction
Marshall Bradley -
 Micro-Doppler Sonar Simulation
Micro-Doppler Sonar Simulation
Marshall Bradley -
Human Walking Animation
Marshall Bradley -
Bayesian Range Weighting for Sonar
Marshall Bradley