Motion of Quadruple Pendulum

Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
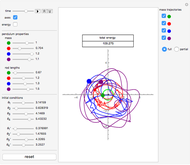
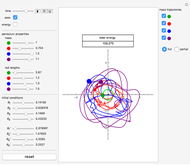
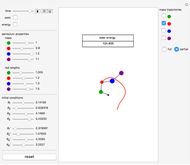
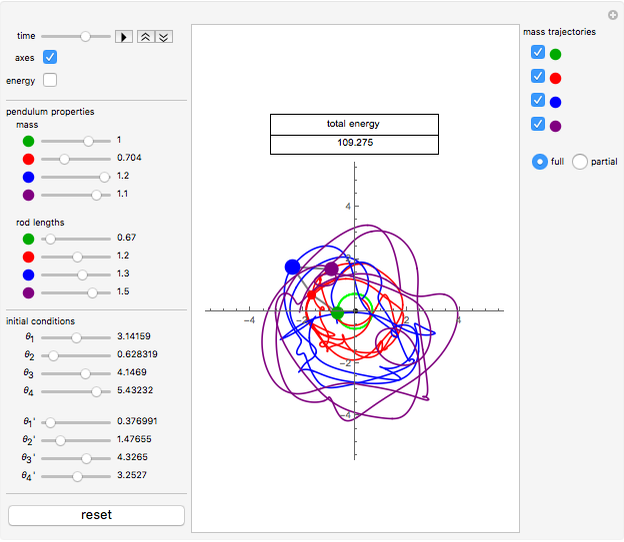
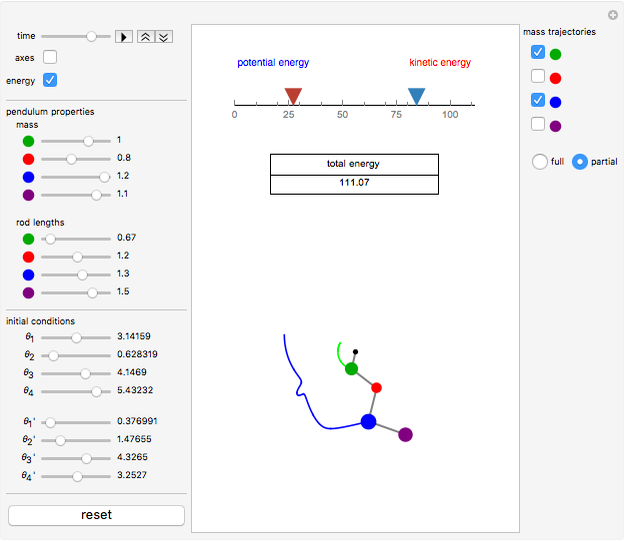
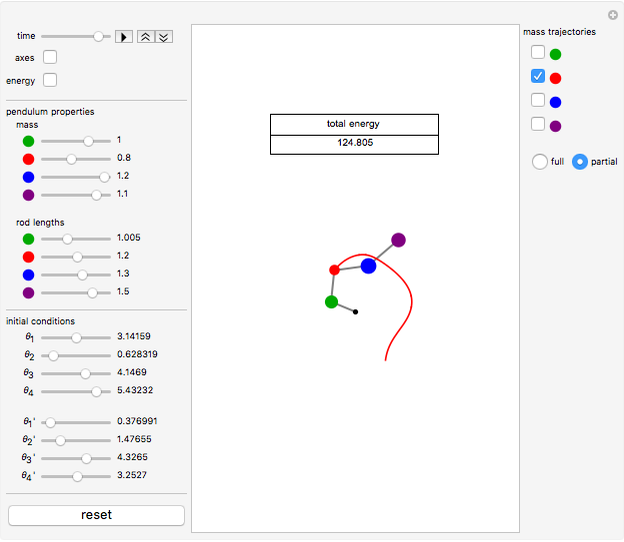
This Demonstration shows the motion of a quadruple pendulum, consisting of four point masses connected by massless rods. In common with the double and triple pendulum, the quadruple pendulum can exhibit chaotic behavior. After you change a control, click the "reset" button to see the effect.
[more]
Contributed by: Vighnesh Souda (March 2015)
Enhanced by: Erik Mahieu
Open content licensed under CC BY-NC-SA
Snapshots

Details
Following are the steps for finding the equations of motion for each mass in the quadruple pendulum:
1. Find the equations for both kinetic energy and potential energy.
2. From these equations, calculate the Lagrangian by subtracting potential energy from kinetic energy.
3. The partial derivative of the Lagrangian with respect to the derivative of each angle is calculated (call this expression 1).
4. Calculate the derivative of expression 1 with respect to time (call this expression 2).
5. Calculate the partial derivative of the Lagrangian with respect to each angle (call this expression 3).
6. Set expressions 2 and 3 equal to form the Euler–Lagrange differential equation.
There are four Euler–Lagrange differential equations, all of which are second order. Each of these four equations correlates to the angle of the corresponding mass in the quadruple pendulum.
Reference
[1] W. S. Harvie. "AP Physics C Notes." (Mar 26, 2015) teachers.sduhsd.net/tpscience/physics/notes/AP%20 Physics %20 C %20 Notes %20-%20 Mechanics/166%20-%20209 E %20 Harmonic %20 Oscillations.pdf.
Permanent Citation
"Motion of Quadruple Pendulum"
http://demonstrations.wolfram.com/MotionOfQuadruplePendulum/
Wolfram Demonstrations Project
Published: March 27 2015
 Heavy Spring with Double Pendulum
Heavy Spring with Double Pendulum
Nasser M. Abbasi Chaotic Motion of Perturbed Pendulum
Chaotic Motion of Perturbed Pendulum
Enrique Zeleny Chaotic Motion of a Damped Driven Pendulum: Bifurcation, Poincaré Map, Power Spectrum, and Phase Portrait
Chaotic Motion of a Damped Driven Pendulum: Bifurcation, Poincaré Map, Power Spectrum, and Phase Portrait
Nasser M. Abbasi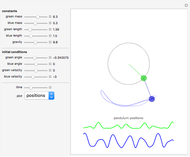 Double Pendulum
Double Pendulum
Rob Morris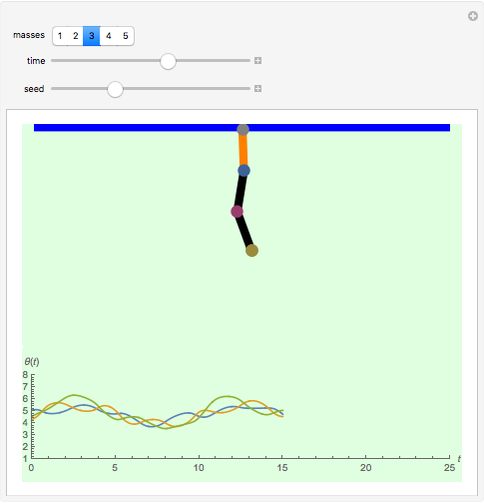 Pendulum with Several Links
Pendulum with Several Links
Enrique Zeleny Pendulum with Three Magnets
Pendulum with Three Magnets
Enrique Zeleny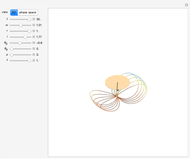 Chaos in a Rotating Pendulum
Chaos in a Rotating Pendulum
Enrique Zeleny Phase Space of a Simple Pendulum
Phase Space of a Simple Pendulum
Housam Binous, Ahmed Bellagi, and Brian G. Higgins Chaotic Dynamics of a Magnetic Pendulum
Chaotic Dynamics of a Magnetic Pendulum
Galen Craven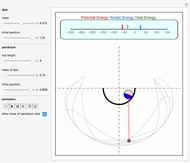 Pendulum Hanging from Rolling Disk
Pendulum Hanging from Rolling Disk
Erik Mahieu