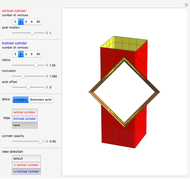
Radial Cam Design
Initializing live version





Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
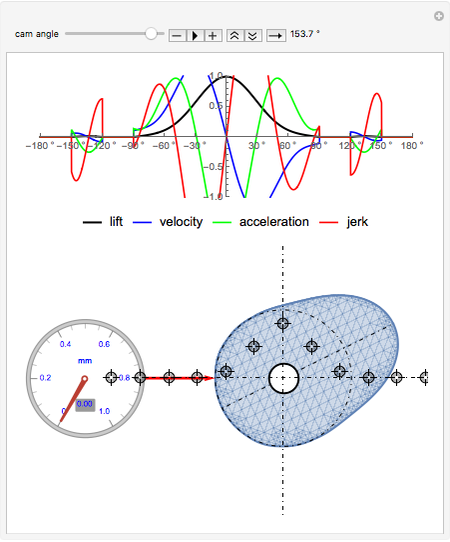
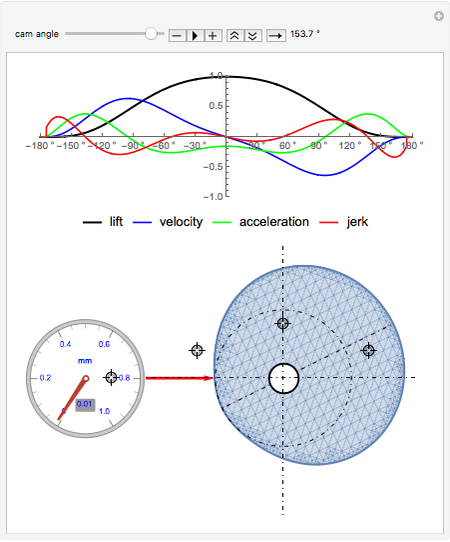
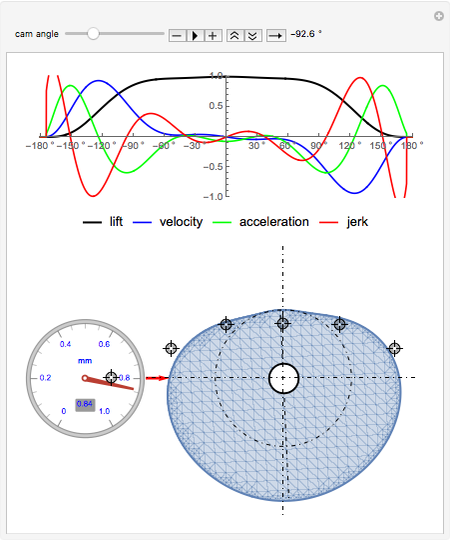
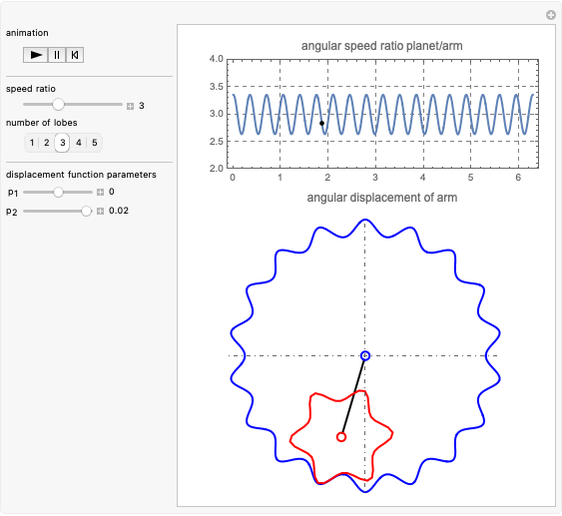
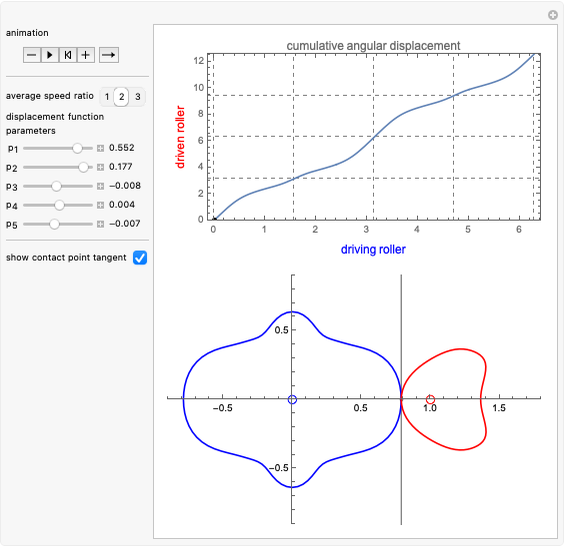
A radial cam converts a rotational motion into a translational motion of the follower. The displacement of the follower is determined by the cam's profile.
[more]
Contributed by: Erik Mahieu (May 2013)
Open content licensed under CC BY-NC-SA
Snapshots



Details
Permanent Citation
Related Demonstrations
More by Author
 Planetary Gear Train
Planetary Gear Train
Erik Mahieu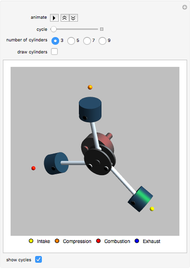 Radial Engine
Radial Engine
Yu-Sung Chang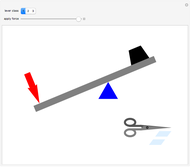 Three Classes of Levers
Three Classes of Levers
S. M. Blinder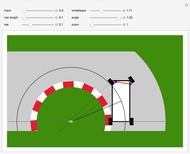 Approximating Ackermann Steering Geometry with a Trapezoidal Linkage
Approximating Ackermann Steering Geometry with a Trapezoidal Linkage
David Askins-Gast Characteristics of Three-Phase Asynchronous Motors
Characteristics of Three-Phase Asynchronous Motors
Anping Zeng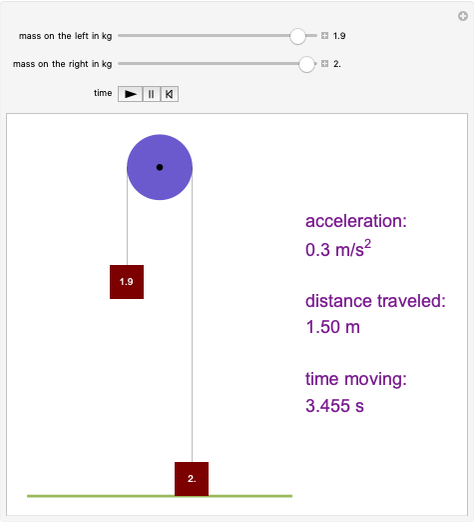 Atwood's Machine
Atwood's Machine
Enrique Zeleny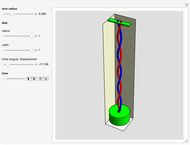 Torsional Pendulum Suspended by Two Stranded Wires
Torsional Pendulum Suspended by Two Stranded Wires
Erik Mahieu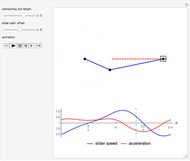 Offset Slider-Crank Mechanism
Offset Slider-Crank Mechanism
Erik Mahieu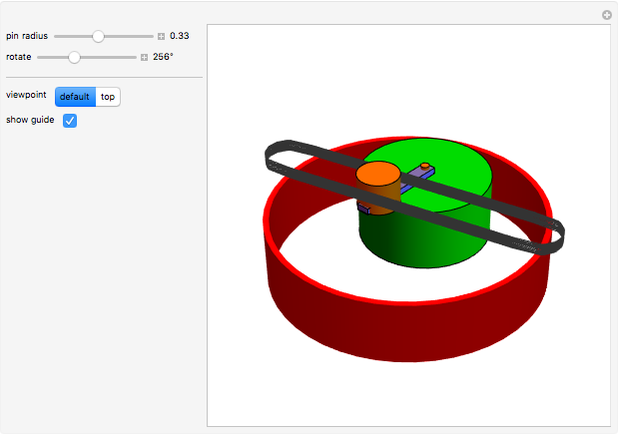 Hypocyclic Mechanism
Hypocyclic Mechanism
Erik Mahieu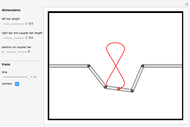 Watt's Lemniscoidal Linkage
Watt's Lemniscoidal Linkage
Erik Mahieu
-
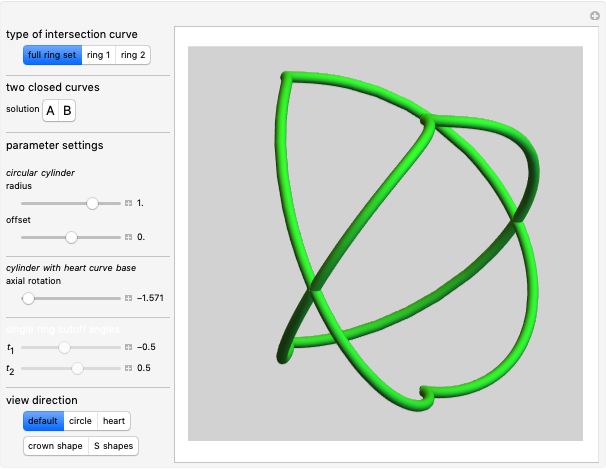 4. Ambiguous Rings Based on a Heart Curve
4. Ambiguous Rings Based on a Heart Curve
Erik Mahieu -
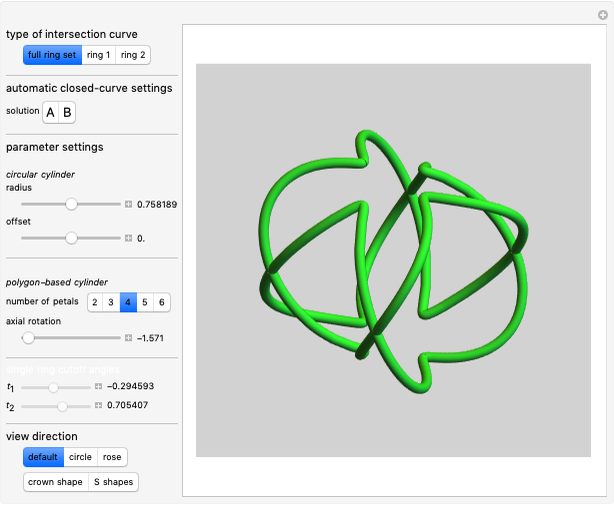 3. Ambiguous Rings Based on a Rose Curve
3. Ambiguous Rings Based on a Rose Curve
Erik Mahieu -
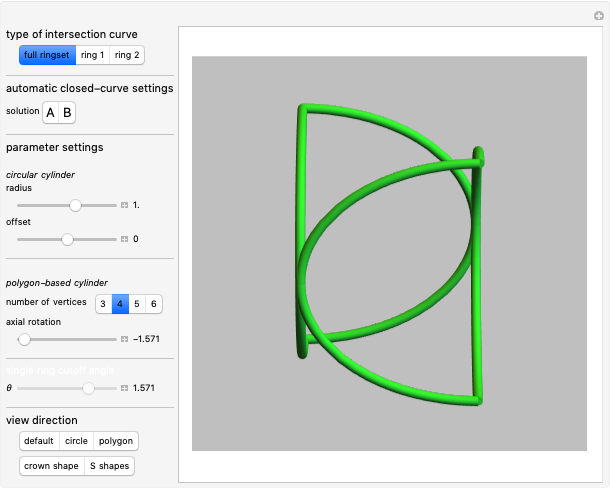 2. Ambiguous Rings Based on a Polygon
2. Ambiguous Rings Based on a Polygon
Erik Mahieu -
 Noncircular Planetary Drive
Noncircular Planetary Drive
Erik Mahieu -
 Noncircular Roller Drive
Noncircular Roller Drive
Erik Mahieu -
Planetary Gear Train
Erik Mahieu -
 Rolling Cycloidal Curves
Rolling Cycloidal Curves
Erik Mahieu -
 Driven Spherical Pendulum
Driven Spherical Pendulum
Erik Mahieu -
 Automatic Feedback Control of a Pendulum-and-Cart System
Automatic Feedback Control of a Pendulum-and-Cart System
Erik Mahieu -
 Intersection of a Generalized Cylinder over a Rose Curve with a Circular Cylinder
Intersection of a Generalized Cylinder over a Rose Curve with a Circular Cylinder
Erik Mahieu -
 1. Ambiguous Rings
1. Ambiguous Rings
Erik Mahieu -
 Elliptic Epitrochoid
Elliptic Epitrochoid
Erik Mahieu -
 Intersection of Two Polygonal Cylinders
Intersection of Two Polygonal Cylinders
Erik Mahieu -
 Designs from Mechanical Linkages
Designs from Mechanical Linkages
Erik Mahieu -
 3D Extrusion Using the Frenet-Serret System
3D Extrusion Using the Frenet-Serret System
Erik Mahieu -
 Daylight Calculator
Daylight Calculator
Erik Mahieu -
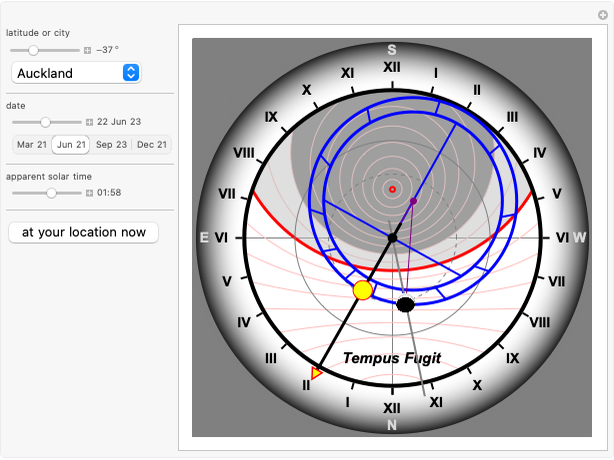 Astronomical Clock
Astronomical Clock
Erik Mahieu -
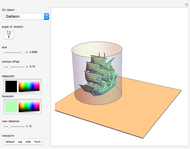 Cylindrical Anamorphosis of 3D Polygonal Meshes
Cylindrical Anamorphosis of 3D Polygonal Meshes
Erik Mahieu -
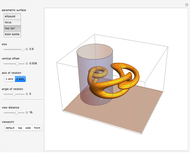 Cylindrical Anamorphosis of Parametric Surfaces
Cylindrical Anamorphosis of Parametric Surfaces
Erik Mahieu -
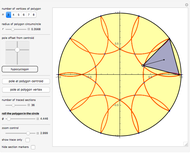 Roulette (Hypotrochogon) of a Polygon Rolling inside a Circle
Roulette (Hypotrochogon) of a Polygon Rolling inside a Circle
Erik Mahieu