Rotating a Cube Using Quaternions




Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
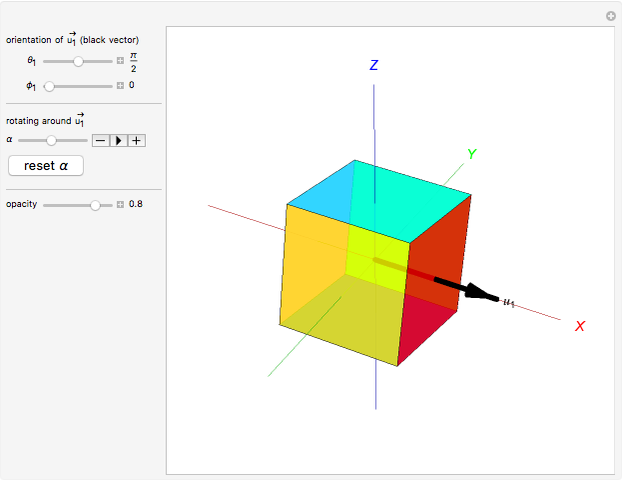
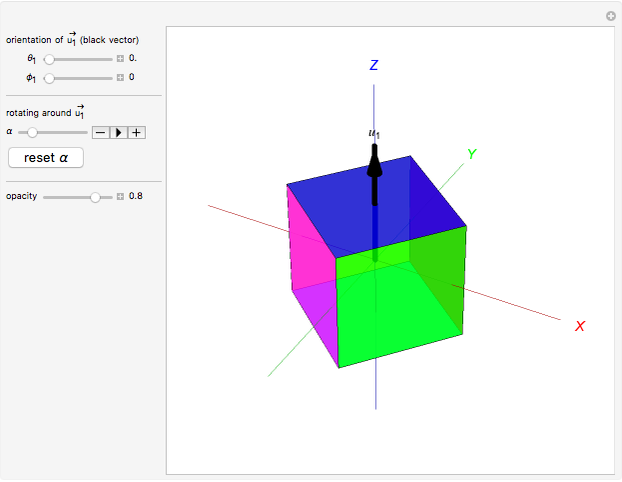
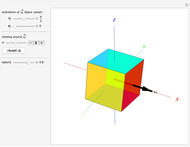
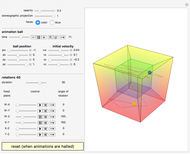
A quaternion can represent both a rotation axis and the angle of rotation about this axis (a vector and a scalar). Instead of turning an object through a series of successive rotations with rotation matrices, quaternions are used to rotate an object more smoothly around an arbitrary axis (here  ) and at any angle. This program uses the quaternion rotation formula:
) and at any angle. This program uses the quaternion rotation formula:  with
with  (a pure quaternion),
(a pure quaternion),  , and for a unit quaternion
, and for a unit quaternion  , such that if
, such that if  ,
,  . A derivation of these formulas is given in [1].
. A derivation of these formulas is given in [1].
Contributed by: Gerard Balmens (February 2016)
Open content licensed under CC BY-NC-SA
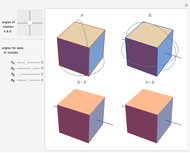
Snapshots

Details
Reference
[1] Wikipedia. "Quaternions and Spatial Rotation." (Feb 9, 2016) en.wikipedia.org/wiki/Quaternions_and_spatial _rotation.
Permanent Citation
"Rotating a Cube Using Quaternions"
http://demonstrations.wolfram.com/RotatingACubeUsingQuaternions/
Wolfram Demonstrations Project
Published: February 15 2016
 Combining Two 3D Rotations
Combining Two 3D Rotations
George Beck and Jeff Bryant Iterated Random Rotation 3D
Iterated Random Rotation 3D
Michael Schreiber Tetrahedron Centers
Tetrahedron Centers
Ed Pegg Jr Fate of the Euler Line and the Nine-Point Circle on the Sphere
Fate of the Euler Line and the Nine-Point Circle on the Sphere
Paolo Maraner Biggest Little Polyhedron
Biggest Little Polyhedron
Ed Pegg Jr Digon Tiling of a Hosohedron
Digon Tiling of a Hosohedron
Michael Schreiber Rotating Laser Sword in 3D
Rotating Laser Sword in 3D
Marvin Jones Three Points Determine a Plane
Three Points Determine a Plane
Ed Pegg Jr Constructing Vector Geometry Solutions
Constructing Vector Geometry Solutions
Michael Rogers (Oxford College of Emory University) Euler Angles for Space Shuttle
Euler Angles for Space Shuttle
S. M. Blinder
-
 Rotating a Hypercube in Four Dimensions with Eight Spaced Cubes
Rotating a Hypercube in Four Dimensions with Eight Spaced Cubes
Gerard Balmens -
 Rotating a Cube Using Quaternions
Rotating a Cube Using Quaternions
Gerard Balmens -
 Rotating a Unit Vector in 3D Using Quaternions
Rotating a Unit Vector in 3D Using Quaternions
Gerard Balmens -
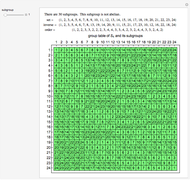 The 30 Subgroups of the Symmetric Group on Four Symbols
The 30 Subgroups of the Symmetric Group on Four Symbols
Gerard Balmens -
 Dihedral Group of the Square
Dihedral Group of the Square
Gerard Balmens -
 Stereographic Projection of a Cube
Stereographic Projection of a Cube
Gerard Balmens -
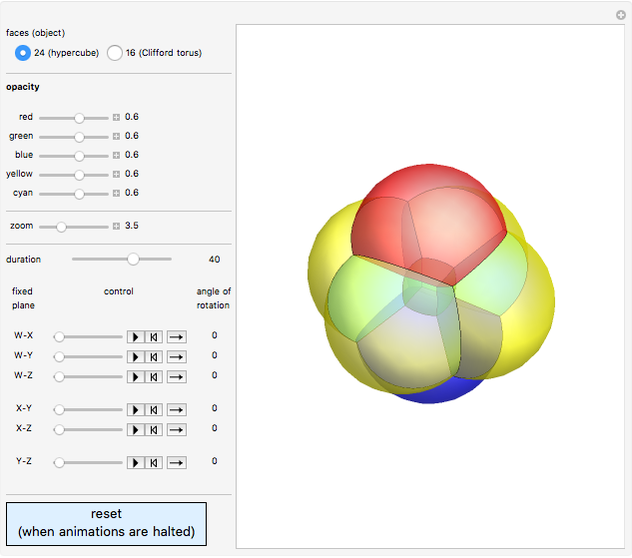 Stereographic Projection of a Hypercube
Stereographic Projection of a Hypercube
Gerard Balmens -
 Geodesics of a Torus Solved with a Method of Lagrange
Geodesics of a Torus Solved with a Method of Lagrange
Gerard Balmens -
 Billiard in a 4D Hypercube
Billiard in a 4D Hypercube
Gerard Balmens -
 Stereographic Projection of a 4D Clifford Torus
Stereographic Projection of a 4D Clifford Torus
Gerard Balmens -
 Rotating a Hypercube in 4D
Rotating a Hypercube in 4D
Gerard Balmens