Sensor Fusion with Normally Distributed Noise



Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
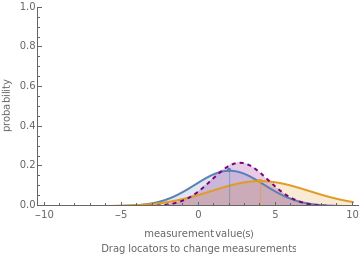
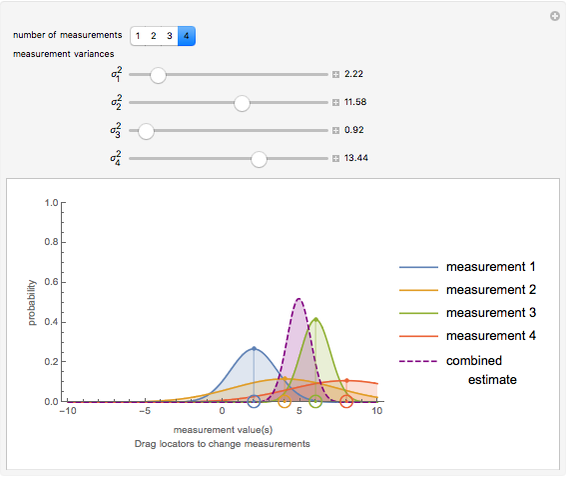
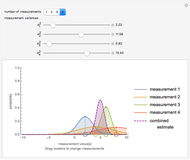
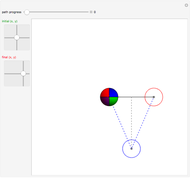
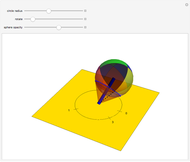
Given  unbiased sensor measurements of a scalar quantity, each corrupted by independent, normally distributed noise with variance
unbiased sensor measurements of a scalar quantity, each corrupted by independent, normally distributed noise with variance  , the likelihood function for the true value (purple, dashed) is also a normal density.
, the likelihood function for the true value (purple, dashed) is also a normal density.
Contributed by: Aaron Becker (June 2015)
University of Houston
Open content licensed under CC BY-NC-SA
Snapshots

Details
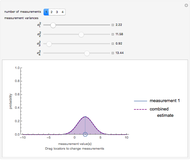
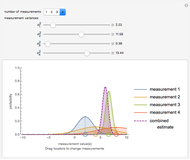
Combining sensor measurements is called sensor fusion. If each sensor measurement is corrupted by independent noise, each measurement provides additional information. The information of a measurement is equal to the inverse of its variance.
The measurements are combined according to Bayes's theorem. Given two measurements  and
and  with variances
with variances  and
and  , the best estimate for the true value is
, the best estimate for the true value is  with variance
with variance  .
.
This can be written in recursive form, to update estimate  with measurement
with measurement  to form
to form  :
:
 ,
,
 ,
,
 .
.
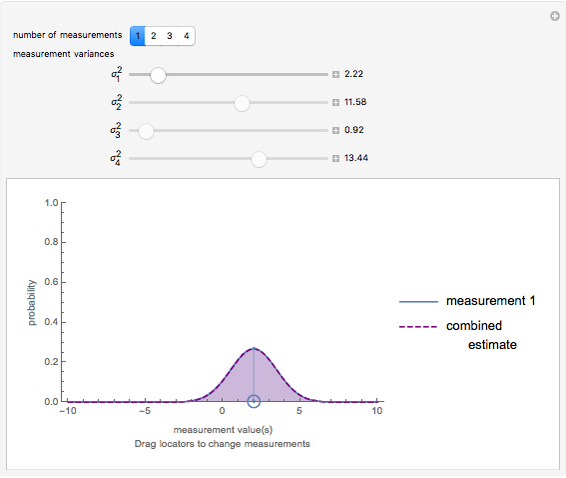
These recursive equations are the scalar Kalman filter equations, and  is also known as the optimal Kalman gain. If only one measurement exists, the combined measurement is identical to the original measurement.
is also known as the optimal Kalman gain. If only one measurement exists, the combined measurement is identical to the original measurement.
Permanent Citation
 Comparing Gamma and Log-Normal Distributions
Comparing Gamma and Log-Normal Distributions
Abdelhameed El-Shaarawi, Nagham Muslim Mohammad, and Ian McLeod The Empirical Rule for Normal Distributions
The Empirical Rule for Normal Distributions
Marc Brodie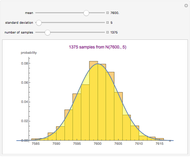 Impact of Sample Size on Approximating the Normal Distribution
Impact of Sample Size on Approximating the Normal Distribution
Paul Savory (University of Nebraska-Lincoln)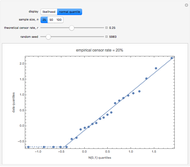 Comparing Exact and Approximate Censored Normal Likelihoods
Comparing Exact and Approximate Censored Normal Likelihoods
Ian McLeod and Nagham Muslim Mohammad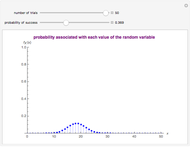 Binomial Probability Distribution
Binomial Probability Distribution
Paul Savory (University of Nebraska ? Lincoln)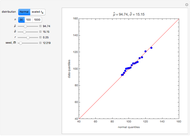 Estimating and Diagnostic Checking in Censored Normal Random Samples
Estimating and Diagnostic Checking in Censored Normal Random Samples
Nagham Muslim Mohammad and Ian McLeod Informal Power Assessment of the Normal Probability Plot
Informal Power Assessment of the Normal Probability Plot
Ian McLeod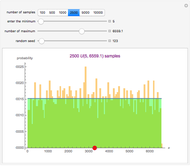 Impact of Sample Size on Approximating the Uniform Distribution
Impact of Sample Size on Approximating the Uniform Distribution
Paul Savory (University of Nebraska-Lincoln) Impact of Sample Size on Approximating the Triangular Distribution
Impact of Sample Size on Approximating the Triangular Distribution
Paul Savory (University of Nebraska-Lincoln)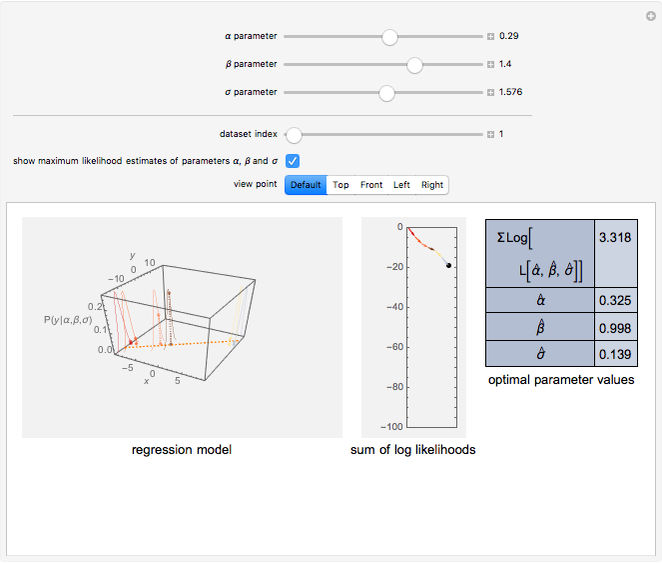 Maximum Likelihood Estimators with Normally Distributed Error
Maximum Likelihood Estimators with Normally Distributed Error
Seth J. Chandler
-
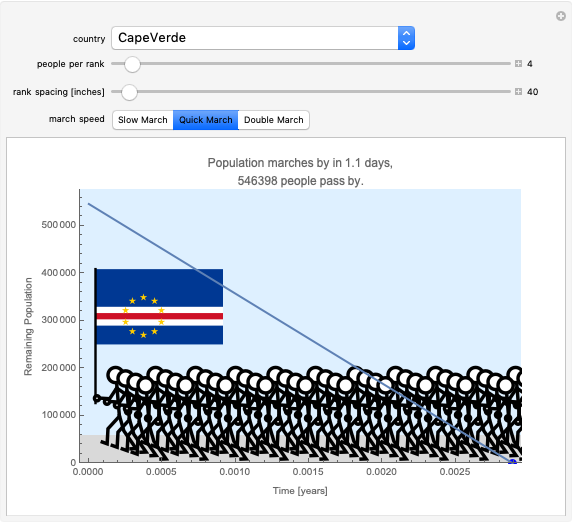 The Marching Chinese
The Marching Chinese
Aaron Becker -
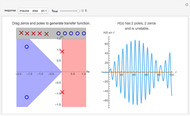 Poles and Zeros of Time-Domain Response Functions
Poles and Zeros of Time-Domain Response Functions
Aaron Becker -
 Parametric Equation of a Circle in 3D
Parametric Equation of a Circle in 3D
Aaron Becker -
 Kinematics of Planar Elastic Chains
Kinematics of Planar Elastic Chains
Aaron Becker -
 Sensor Fusion with Normally Distributed Noise
Sensor Fusion with Normally Distributed Noise
Aaron Becker -
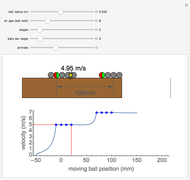 Optimizing a Gauss Gun
Optimizing a Gauss Gun
Aaron Becker -
 Ensemble Control of Robots with Unicycle Kinematics
Ensemble Control of Robots with Unicycle Kinematics
Aaron Becker -
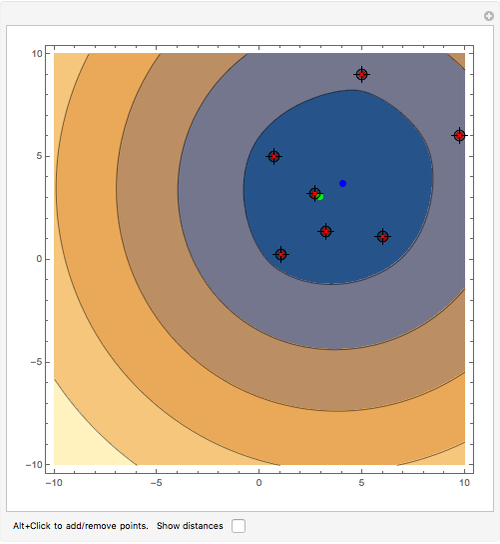 Weber Points and Multifocal Ellipse
Weber Points and Multifocal Ellipse
Aaron Becker -
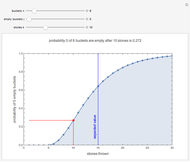 Coverage Probability with the Occupancy Problem
Coverage Probability with the Occupancy Problem
Aaron Becker -
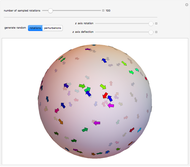 Sampling a Uniformly Random Rotation
Sampling a Uniformly Random Rotation
Aaron Becker -
 Roll a Sphere without Changing Orientation to a New Location in Two Straight Rolls
Roll a Sphere without Changing Orientation to a New Location in Two Straight Rolls
Aaron Becker -
 Gridiron Pendulum
Gridiron Pendulum
Aaron Becker -
 Roll Any Point on the Sphere to Any Desired Latitude-Longitude Coordinates with One Straight-Line Roll
Roll Any Point on the Sphere to Any Desired Latitude-Longitude Coordinates with One Straight-Line Roll
Aaron Becker -
 Re-Orient a Sphere with Two Straight Rolls
Re-Orient a Sphere with Two Straight Rolls
Aaron Becker -
 Dark Fraction of the Moon
Dark Fraction of the Moon
Aaron Becker -
 Curvature of the Projection of a Trefoil Knot
Curvature of the Projection of a Trefoil Knot
Aaron Becker -
 Tangent Plane to a Sphere
Tangent Plane to a Sphere
Aaron Becker -
 Morph Sphere to Disc
Morph Sphere to Disc
Aaron Becker -
 Rolling a Sphere around a Circle without Slipping
Rolling a Sphere around a Circle without Slipping
Aaron Becker -
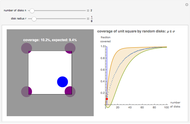 Coverage of a Unit Square by Random Discs
Coverage of a Unit Square by Random Discs
Aaron Becker