Spring-Mass-Damper (SMD) System with Proportional Derivative (PD) Controller




Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
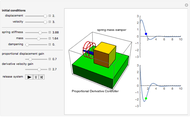
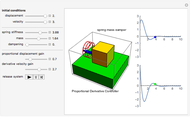
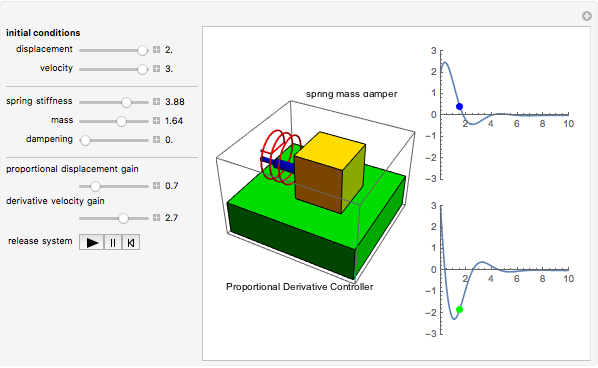
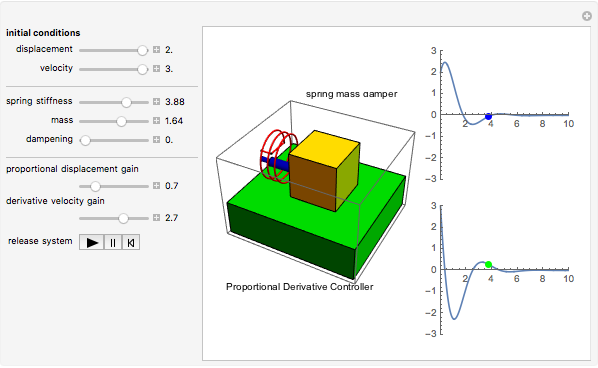
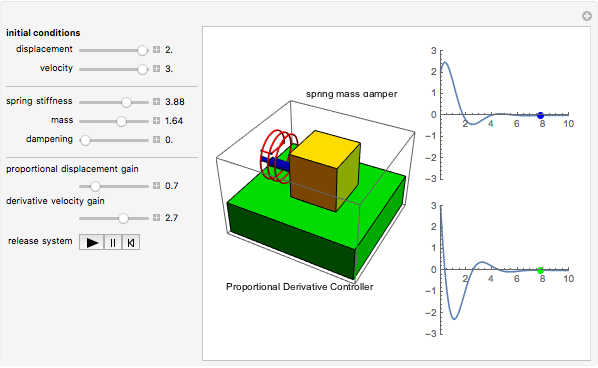
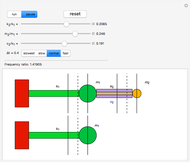
This Demonstration shows a spring-mass-damper system (SMD) with a proportional derivative (PD) controller in the time domain. The simulation includes a general solution for a free system with initial conditions (including under-, over-, and critically-damped conditions).
[more]
Contributed by: Stephen Wilkerson (Army Research Laboratory and Towson University), Nathan Slegers (University of Alabama, Huntsville), and Chris Arney (United States Military Academy, West Point) (March 2011)
Open content licensed under CC BY-NC-SA
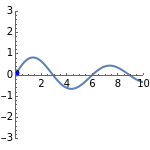
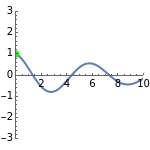
Snapshots

Details
The derivation follows the traditional form of [1] where  ,
,  , and
, and  are the mass, dampening coefficient, and spring’s stiffness, respectively. The variable describing the system and controller is:
are the mass, dampening coefficient, and spring’s stiffness, respectively. The variable describing the system and controller is:

in terms of the displacement  .
.
Newton’s second law leads to the differential equation:
 .
.
Since the stretch of the spring  and weight of the masses
and weight of the masses  cancel,
cancel,  , this reduces to:
, this reduces to:
 ,
,
where:

and
 .
.
This is solved as a continuous system in the time domain. For this example it is assumed that is known exactly.
References: [1] W. Weaver, Jr., S. Timoshenko, and D. H. Young, Vibration Problems in Engineering, 5th ed., New York: John Wiley & Sons, 1990. [2] G. F. Franklin, J. D. Powell, and A. Emami-Naeini, Feedback Control of Dynamic Systems, 4th ed., Upper Saddle River, NJ: Prentice Hall, 2002.
Permanent Citation
 Tuned Mass Damper
Tuned Mass Damper
Nabil Fares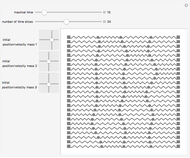 Time Evolution of a Four-Spring Three-Mass System
Time Evolution of a Four-Spring Three-Mass System
Michael Trott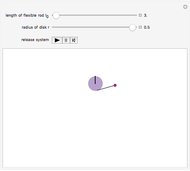 Falling Mass Attached to a Rigid Pulley
Falling Mass Attached to a Rigid Pulley
Sarah Lichtblau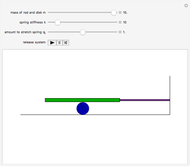 Motion of a Rolling Disk Driven by a Rod and Spring
Motion of a Rolling Disk Driven by a Rod and Spring
Sarah Lichtblau Motion of a Disk Hanging from a Spring on an Inclined Plane
Motion of a Disk Hanging from a Spring on an Inclined Plane
Sarah Lichtblau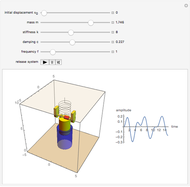 Forced Oscillations
Forced Oscillations
Stephen Wilkerson and Mark Evans (Towson University)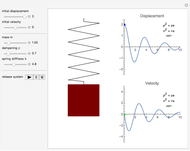 Free Vibrations of a Spring-Mass-Damper System
Free Vibrations of a Spring-Mass-Damper System
Stephen Wilkerson (Army Research Laboratory and Towson University), Nathan Slegers (University of Alabama Huntsville), and Chris Arney (United States Military Academy, West Point)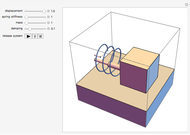 Simple Spring Mass Damping
Simple Spring Mass Damping
Stephen Wilkerson (Towson University) Dynamics of a Double Spring Mass
Dynamics of a Double Spring Mass
Stephen Wilkerson (United States Military Academy West Point) Two Masses with Forcing Functions Oscillating between Three Springs
Two Masses with Forcing Functions Oscillating between Three Springs
Stephen Wilkerson