Steering Multiple Radio Control (RC) Cars with One Joystick



Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
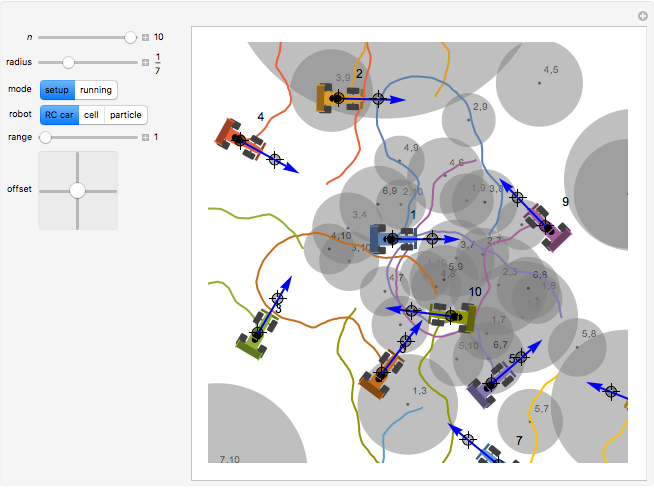
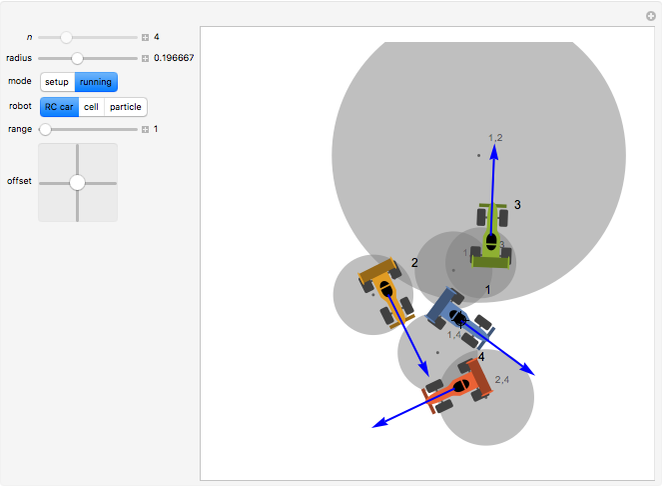
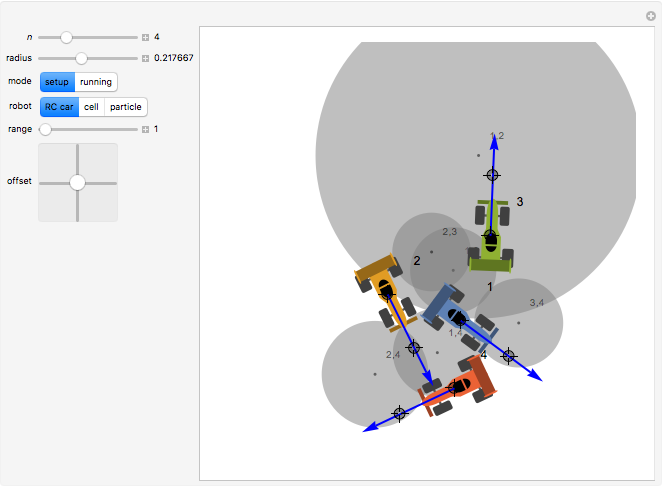
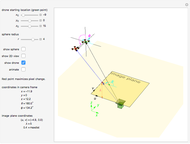
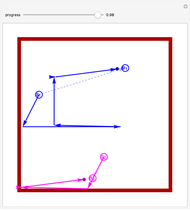
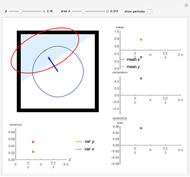
Imagine  radio control (RC) cars all controlled using the same radio frequency. When you command one car to move along a certain trajectory, all other cars follow a trajectory of the same shape, starting from their initial positions and rotated according to their initial heading. Each pair of cars can collide only in the regions shown by gray disks. During "setup," gray disks determine where two cars can collide. This collision area is a function of the position and orientation of the cars, so changing these changes the positions of the disks. The car used as reference for commands is car 1, so during "running" the gray disks show where car 1 must be positioned to make any two cars collide. The paths of the robots are drawn in different colors. Change
radio control (RC) cars all controlled using the same radio frequency. When you command one car to move along a certain trajectory, all other cars follow a trajectory of the same shape, starting from their initial positions and rotated according to their initial heading. Each pair of cars can collide only in the regions shown by gray disks. During "setup," gray disks determine where two cars can collide. This collision area is a function of the position and orientation of the cars, so changing these changes the positions of the disks. The car used as reference for commands is car 1, so during "running" the gray disks show where car 1 must be positioned to make any two cars collide. The paths of the robots are drawn in different colors. Change  to generate new robots.
to generate new robots.
Contributed by: Aaron T. Becker and Javier Garcia (January 2019)
Open content licensed under CC BY-NC-SA
Details
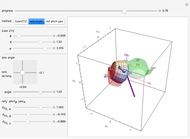
This model was explored by Bretl [1] and can be applied to many types of systems that are steered by a global field. The robots can be RC cars, living cells that orient themselves and move at an offset angle from a global magnetic field [2], or self-propelled magnetic dipoles with a catalytic cap oriented at random angles with respect to a magnetic dipole [3]. This model has special relevance at the micro- and nanoscales, where multiple similar robots can be considered. The robots are usually controlled by a global control signal such as a magnetic or electric field. In all models, each robot's pose is described by an  position and an orientation
position and an orientation  .
.
Robots  and
and  can meet at only one location called
can meet at only one location called  . This location exists if
. This location exists if  :
:
 .
.
If  , the robots can collide only if they start at the same position; they remain in collision thereafter. There are
, the robots can collide only if they start at the same position; they remain in collision thereafter. There are  potential collision areas. Each collision area is a disk centered at
potential collision areas. Each collision area is a disk centered at  with radius
with radius  , where
, where  is the radius of the robot.
is the radius of the robot.
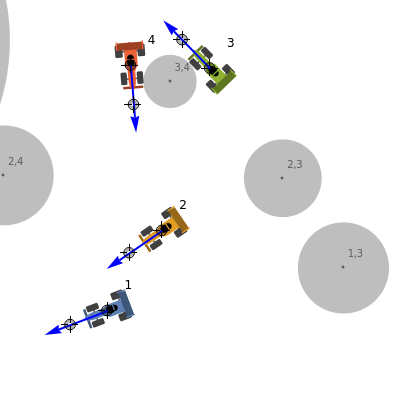
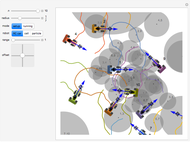
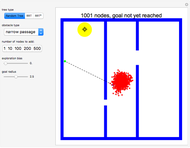
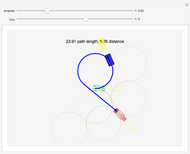
Knowing where any two robots can meet enables determination of whether a collision-free path exists. Set the mode to "running": if there is a path between robot 1 and a goal location that does not touch any gray disks, following that path will avoid all robot collisions. The thumbnail image shows a path for robot 1 that avoids collisions with all 10 robots.
References
[1] T. Bretl, "Control of Many Agents Using Few Instructions," in Robotics: Science and Systems III (W. Burgard, O. Brock and C. Stachniss, eds.), Cambridge, MA: MIT Press, 2008 pp. 209–216. doi:10.15607/RSS.2007.III.027.
[2] A. Becker, Y. Ou, P. Kim, M. J. Kim and A. Julius, "Feedback Control of Many Magnetized: Tetrahymena Pyriformis Cells by Exploiting Phase Inhomogeneity," in 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, IEEE, 2013 pp. 3317–3323. doi:10.1109/IROS.2013.6696828.
[3] S. Das, E. B. Steager, K. J. Stebe and V. Kumar, "Simultaneous Control of Spherical Microrobots Using Catalytic and Magnetic Actuation," in 2017 International Conference on Manipulation, Automation and Robotics at Small Scales (MARSS), Montreal, QC, Canada, IEEE, 2017 pp. 1–6. doi:10.1109/MARSS.2017.8001924.
Snapshots



Permanent Citation
 Fractal Robot Arm
Fractal Robot Arm
Sándor Kabai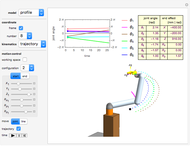 Joint Space and Tooling Space for Robot Motion Control
Joint Space and Tooling Space for Robot Motion Control
Frederick Wu Robot Motion with Obstacles
Robot Motion with Obstacles
Aaron T. Becker and Haoran Zhao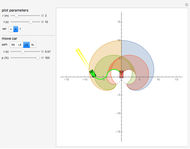 Isochrons for a Dubins Car
Isochrons for a Dubins Car
Aaron T. Becker and Shiva Shahrokhi Quarter-Car Suspension Model with Double Spring
Quarter-Car Suspension Model with Double Spring
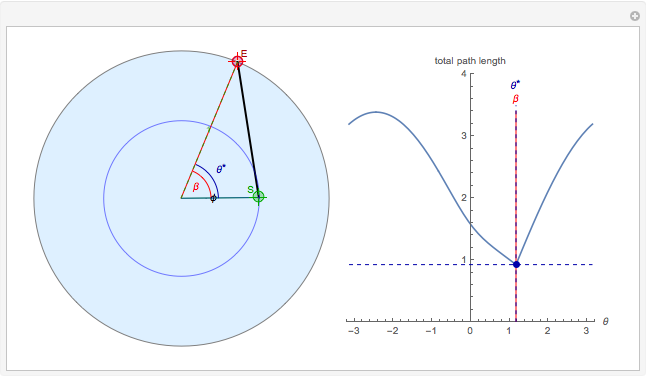
Jon Neades The Homicidal Chauffeur Problem
The Homicidal Chauffeur Problem
Aaron T. Becker and Javier Garcia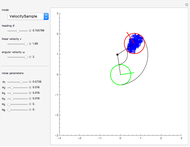 Probabilistic Models for Robot Motion
Probabilistic Models for Robot Motion
Aaron T. Becker and Renuka Pakeetharan Forward Kinematics
Forward Kinematics
Rob Lockhart Snake-Arm Robot
Snake-Arm Robot
Sándor Kabai Inverse Kinematics
Inverse Kinematics
Rob Lockhart
-
 Maximizing Apparent Velocity in a Camera's Frame
Maximizing Apparent Velocity in a Camera's Frame
Aaron T. Becker -
 Steering Multiple Radio Control (RC) Cars with One Joystick
Steering Multiple Radio Control (RC) Cars with One Joystick
Aaron T. Becker -
 Distribution of a Swarm of Robots in a Circular Workplace under Gravity
Distribution of a Swarm of Robots in a Circular Workplace under Gravity
Aaron T. Becker -
 Robot Manipulator Workspaces
Robot Manipulator Workspaces
Aaron T. Becker -
The Homicidal Chauffeur Problem
Aaron T. Becker -
 Rapidly Exploring Random Tree (RRT) and RRT*
Rapidly Exploring Random Tree (RRT) and RRT*
Aaron T. Becker -
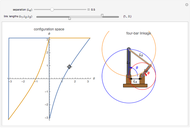 Configuration Space for Four-Bar Linkage
Configuration Space for Four-Bar Linkage
Aaron T. Becker -
Isochrons for a Dubins Car
Aaron T. Becker -
 Shortest Path for the Dubins Car
Shortest Path for the Dubins Car
Aaron T. Becker -
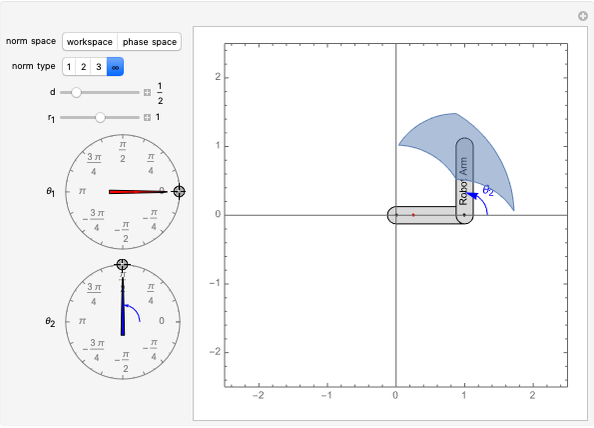 Distance Norms in Robot Workspace and Phase Space
Distance Norms in Robot Workspace and Phase Space
Aaron T. Becker -
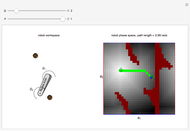 Breadth-First Search Robot Motion Planning
Breadth-First Search Robot Motion Planning
Aaron T. Becker -
 Spreading Particles in a Disk
Spreading Particles in a Disk
Aaron T. Becker -
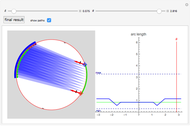
 Shortest Path between Two Points in the Unit Disk Reflecting off the Circumference
Shortest Path between Two Points in the Unit Disk Reflecting off the Circumference
Aaron T. Becker -
 Three Parametrizations of Rotations
Three Parametrizations of Rotations
Aaron T. Becker -
 Moving Two Particles with Shared Control Inputs Using Wall Friction
Moving Two Particles with Shared Control Inputs Using Wall Friction
Aaron T. Becker -
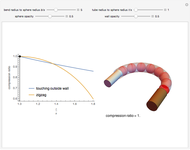 Compression Ratio of Spheres in a Curved Tube
Compression Ratio of Spheres in a Curved Tube
Aaron T. Becker -
 Common Robot Arm Configurations
Common Robot Arm Configurations
Aaron T. Becker -
 Distribution of a Robot Swarm in a Square under Gravity
Distribution of a Robot Swarm in a Square under Gravity
Aaron T. Becker -
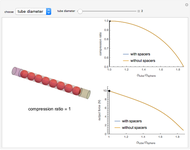 Transmitting Force through a Tube Filled with Spheres and Spacers
Transmitting Force through a Tube Filled with Spheres and Spacers
Aaron T. Becker -
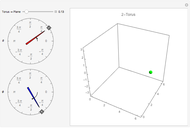 Chart for a Torus
Chart for a Torus
Aaron T. Becker