Swerve Drive Robot



Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
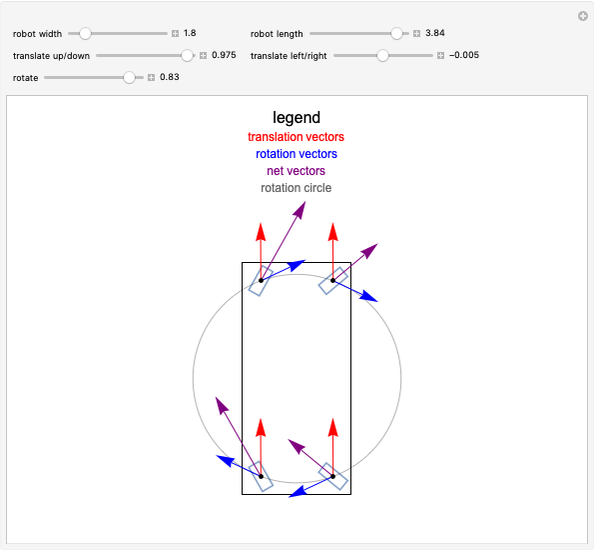
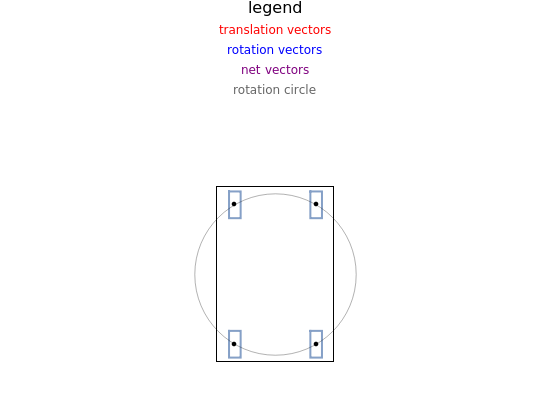
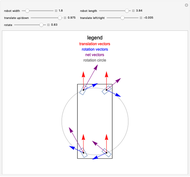
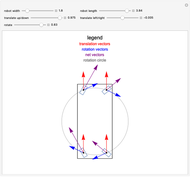
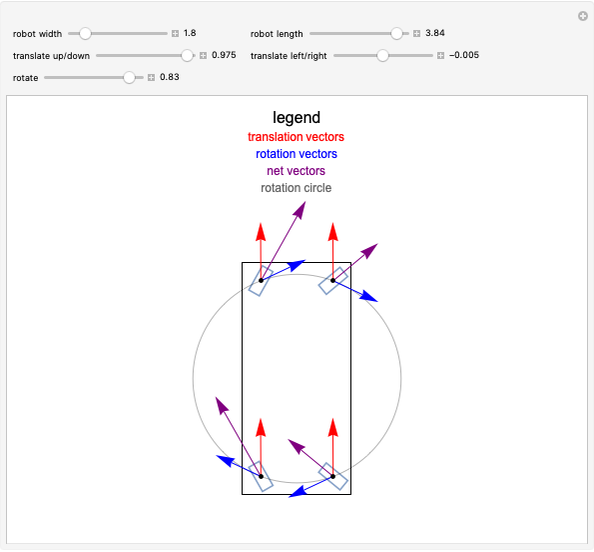
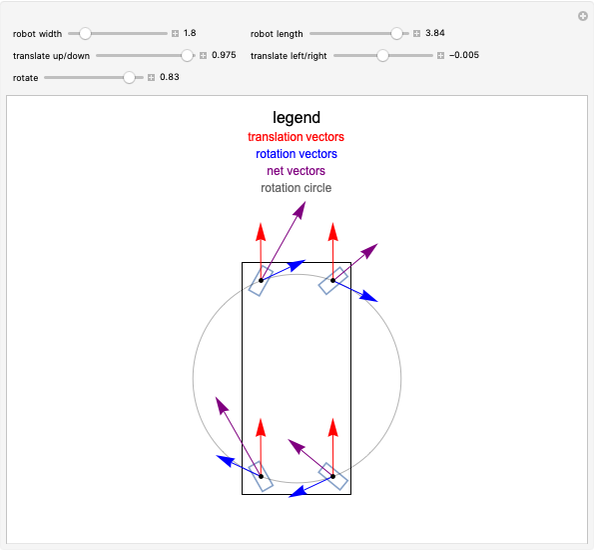
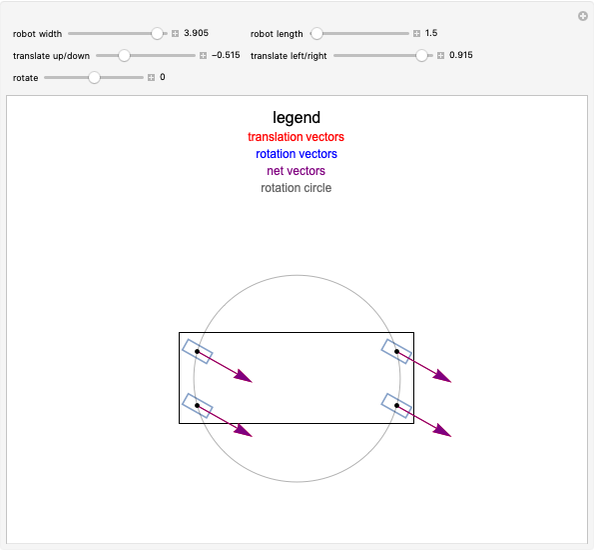
This Demonstration simulates a robot with a swerve drivetrain [1, 2]. Given a combination of robot translations and rotations, the translation, rotation and output vectors for each of the four independent swerve modules are computed and displayed. You can determine the vectors for each module for desired translation and rotation of the robot.
[more]
Contributed by: Jatin Kohli (February 2020)
Open content licensed under CC BY-NC-SA
Snapshots

Details
References
[1] "Swerve Central." (Dec 31, 2019) team1640.com/wiki/index.php/Swerve_Central.
[2] Team 1072 - Harker Robotics. "First Robotics Competition, 2019." (Dec 31, 2019) frc-events.firstinspires.org/2019/team/1072.
Permanent Citation
 Minkowski Sum of Convex Robot and Obstacle
Minkowski Sum of Convex Robot and Obstacle
Shreyas Poyrekar, Arifa Sultana and Aaron T. Becker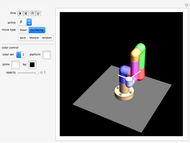 Animated Model of an Industrial Robot Arm
Animated Model of an Industrial Robot Arm
Karl Scherer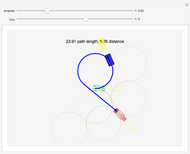 Shortest Path for the Dubins Car
Shortest Path for the Dubins Car
Aaron T. Becker and Shiva Shahrokhi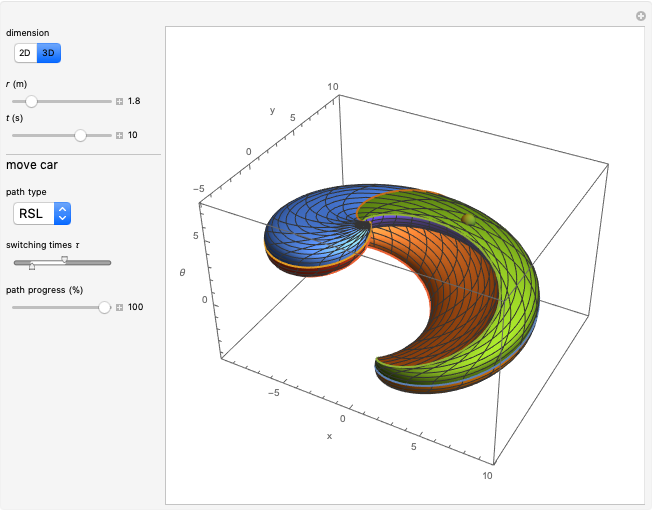 3D Reachability Set for a Dubins Car
3D Reachability Set for a Dubins Car
Mohammad Sultan and Aaron T. Becker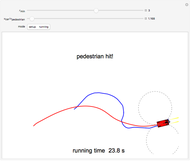 The Homicidal Chauffeur Problem
The Homicidal Chauffeur Problem
Aaron T. Becker and Javier Garcia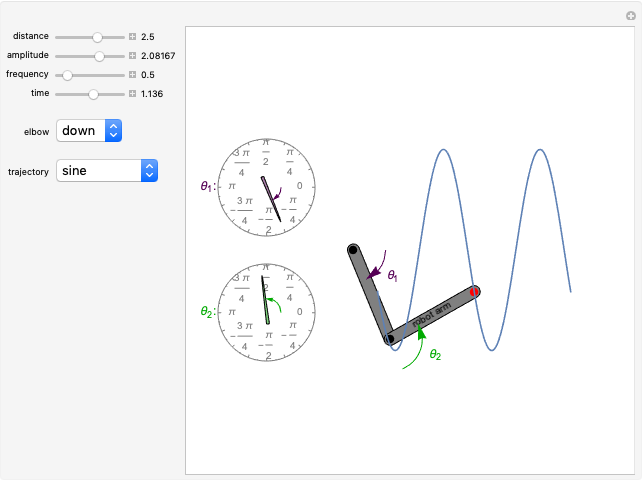 End Effector Trajectory Tracking for Planar Linkage
End Effector Trajectory Tracking for Planar Linkage
Tushar Mollik and Edmon Perkins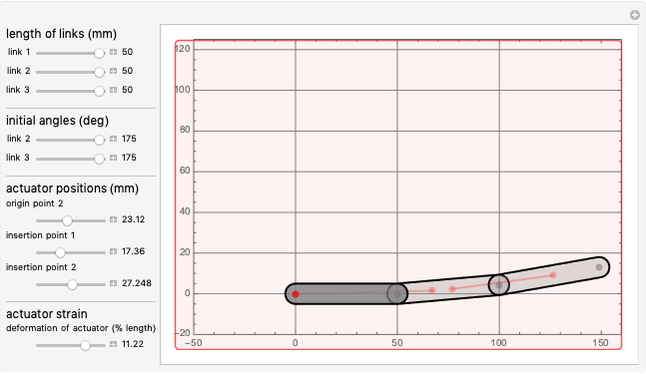 Effects of Deformation on Actuated Joints
Effects of Deformation on Actuated Joints
Scott Kennedy and Edmon Perkins Robot Builder
Robot Builder
Frank Liao Snake-Arm Robot
Snake-Arm Robot
Sándor Kabai Robot Manipulator Workspaces
Robot Manipulator Workspaces
Aaron T. Becker, Benedict Isichei, Muhammad Sultan and Maruthi S. Chemudupati