Synchronization of Chaotic Attractors




Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
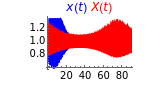
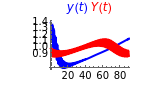
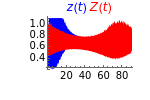
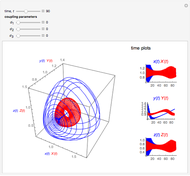
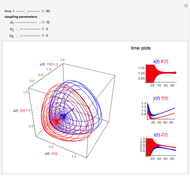
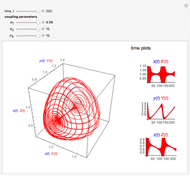
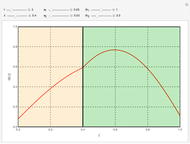
This Demonstration illustrates a method for synchronizing the trajectories of two modified Lotka–Volterra systems. Synchronization is accomplished by linear feedback [1], with the governing equations of the first system [2] as follows:
[more]


















Contributed by: Clay Gruesbeck (August 2013)
Open content licensed under CC BY-NC-SA
Snapshots



Details
References
[1] T. Kapitaniak, Controlling Chaos: Theoretical and Practical Methods in Non-linear Dynamics, San Diego: Academic Press, 1996.
[2] J. S. Costello, "Synchronization of Chaos in a Generalized Lotka–Volterra Attractor," The Nonlinear Journal, 1, 1999 pp. 11–17.
Permanent Citation
 Moore-Spiegel Attractor
Moore-Spiegel Attractor
Milena Cuellar The Rossler Attractor
The Rossler Attractor
Daniel de Souza Carvalho Coupled Lorenz Oscillators
Coupled Lorenz Oscillators
Clay Gruesbeck Memristor Based Chaotic System
Memristor Based Chaotic System
Bharathwaj Muthuswamy (University of California, Berkeley; Milwaukee School of Engineering)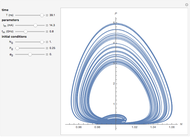 Chaotic Dynamics of a Modulated Semiconductor Laser
Chaotic Dynamics of a Modulated Semiconductor Laser
Manu P. John and V. M. Nandakumaran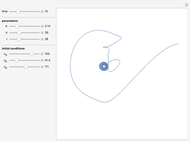 Lorenz Attractor
Lorenz Attractor
Rob Morris Bifurcation Diagram for the Rössler Attractor
Bifurcation Diagram for the Rössler Attractor
Housam Binous Sledding on a Bumpy Slope: Chaos and Strange Attractor
Sledding on a Bumpy Slope: Chaos and Strange Attractor
Robert M. Lurie The Györgyi-Field Model for the Belousov-Zhabotinsky Reaction
The Györgyi-Field Model for the Belousov-Zhabotinsky Reaction
Housam Binous, Brian G. Higgins, and Ahmed Bellagi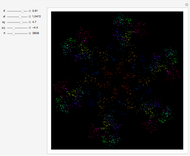 Dynamics of a Charged Particle in a Magnetic Field with a Kicked Electric Field
Dynamics of a Charged Particle in a Magnetic Field with a Kicked Electric Field
Enrique Zeleny
-
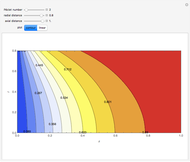
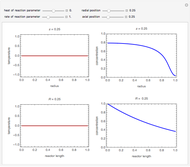
 Radial and Axial Variations in a Nonisothermal Tubular Reactor
Radial and Axial Variations in a Nonisothermal Tubular Reactor
Clay Gruesbeck -
 Miscible Displacement of Oil in Heterogenous Porous Media
Miscible Displacement of Oil in Heterogenous Porous Media
Clay Gruesbeck -
 Simultaneous Heat and Moisture Transfer in a Porous Cylinder
Simultaneous Heat and Moisture Transfer in a Porous Cylinder
Clay Gruesbeck -
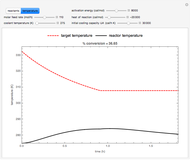 Safe Operation of a Semibatch Reactor
Safe Operation of a Semibatch Reactor
Clay Gruesbeck -
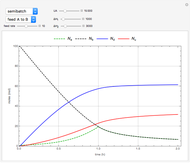 Parallel Nonisothermal Reactions in Batch and Semibatch Reactors
Parallel Nonisothermal Reactions in Batch and Semibatch Reactors
Clay Gruesbeck -
 Heat Transfer between a Bar and a Fluid Reservoir: A Coupled PDE-ODE Model
Heat Transfer between a Bar and a Fluid Reservoir: A Coupled PDE-ODE Model
Clay Gruesbeck -
 External Ballistics of Rifle Bullets
External Ballistics of Rifle Bullets
Clay Gruesbeck -
 Extended Graetz Problem
Extended Graetz Problem
Clay Gruesbeck -
 Heat Transport and Chemical Reaction in Tubular Reactor with Laminar Flow
Heat Transport and Chemical Reaction in Tubular Reactor with Laminar Flow
Clay Gruesbeck -
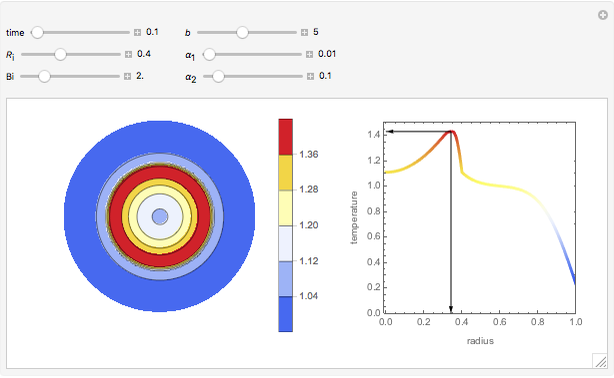
 Transient Cooling of Composite Solids
Transient Cooling of Composite Solids
Clay Gruesbeck -
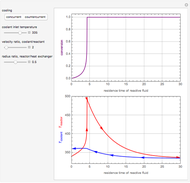 Concurrent and Countercurrent Cooling in Tubular Reactors with Exothermic Chemical Reactions
Concurrent and Countercurrent Cooling in Tubular Reactors with Exothermic Chemical Reactions
Clay Gruesbeck -
 Transient Heat Conduction with a Nuclear Heat Source
Transient Heat Conduction with a Nuclear Heat Source
Clay Gruesbeck -
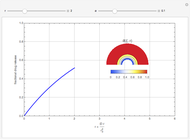 Controlled Release of a Drug from a Hemispherical Matrix
Controlled Release of a Drug from a Hemispherical Matrix
Clay Gruesbeck -
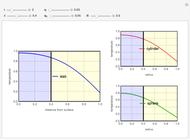
 Cooling of a Composite Slab
Cooling of a Composite Slab
Clay Gruesbeck -
 Unsteady-State Heat Conduction in a Cylinder
Unsteady-State Heat Conduction in a Cylinder
Clay Gruesbeck -
 Adsorption, Diffusion and Chemical Reaction in a Slab
Adsorption, Diffusion and Chemical Reaction in a Slab
Clay Gruesbeck -
 Diffusion and Reaction in a Falling Liquid Film
Diffusion and Reaction in a Falling Liquid Film
Clay Gruesbeck -
 Freezing of Water around a Heat Sink
Freezing of Water around a Heat Sink
Clay Gruesbeck -
 Thermal Diffusivity of a Sphere
Thermal Diffusivity of a Sphere
Clay Gruesbeck -
 Transport and Deposition of Colloid in Rock Fractures
Transport and Deposition of Colloid in Rock Fractures
Clay Gruesbeck