The Dual Basis for the Tangent Space of a 2D Surface

Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
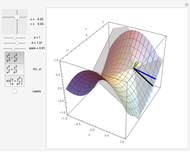
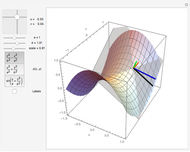
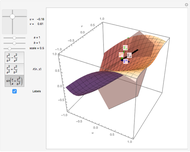
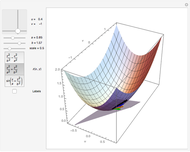
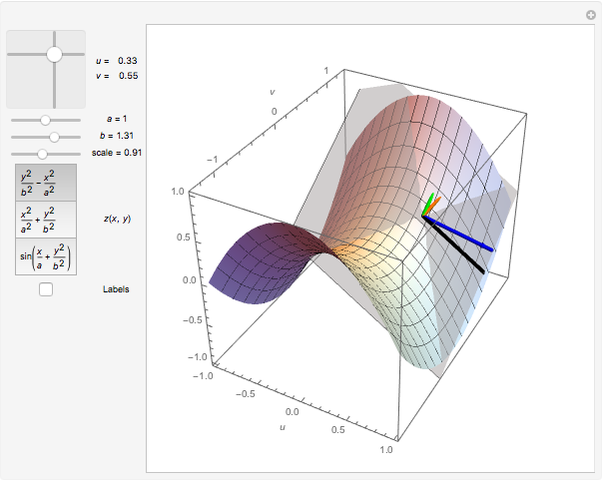
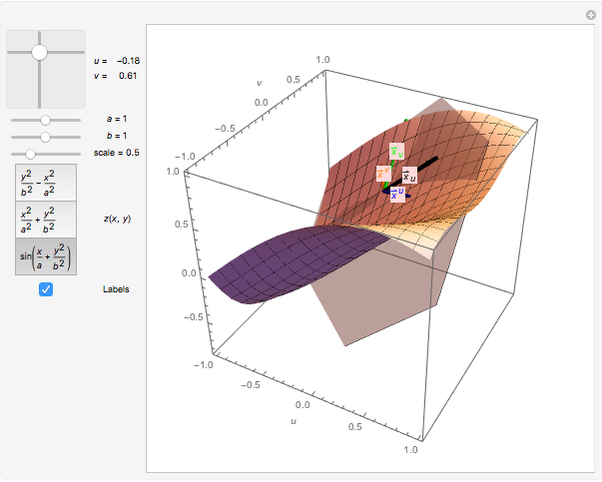
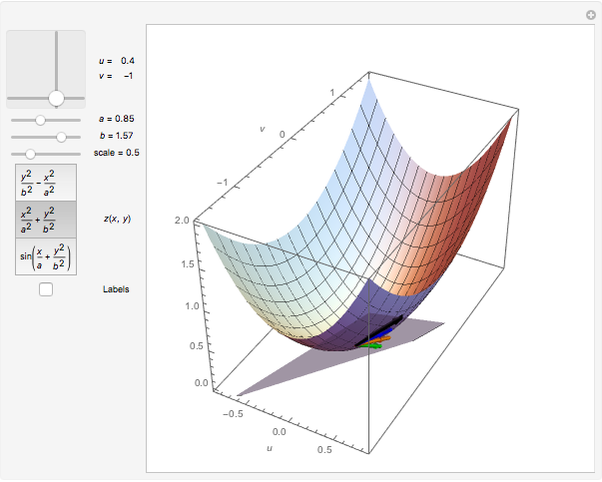
This Demonstration illustrates the tangent plane basis and the reciprocal basis at points along a few sample surfaces. The tangent plane itself is shown and a control is provided to alter the position of the tangent plane along the surface. This lets you see the normality of the tangent plane basis vectors and their alternate indexed reciprocal vector. You can also compare the orientations of the tangent plane basis vectors with their reciprocals, and see how these pairs of vectors are not necessarily collinear.
Contributed by: Peeter Joot (March 2014)
Open content licensed under CC BY-NC-SA
Snapshots
Details
A 3D surface can be represented in a parameterized vector form using two parameters  and
and  as
as  . The partial derivatives
. The partial derivatives  and
and  with respect to these parameters provide a basis
with respect to these parameters provide a basis  for the tangent plane at the point of evaluation. Because those vectors are not necessarily orthogonal, the reciprocal (or dual) vectors
for the tangent plane at the point of evaluation. Because those vectors are not necessarily orthogonal, the reciprocal (or dual) vectors  for the tangent plane can be useful for expressing projection operations. These vectors satisfy the relationship
for the tangent plane can be useful for expressing projection operations. These vectors satisfy the relationship  , for
, for  .
.
This Demonstration shows both the tangent plane basis and the reciprocal basis for a few sample surfaces, and controls for altering those surfaces. You can use the scale control to adjust the length of both pairs of bases should they range out of the image or be too small for visibility. A control for adjusting the  parameters is also provided.
parameters is also provided.
The reciprocal vectors for a two-dimensional subspace basis  can be calculated using the following geometric algebra expression:
can be calculated using the following geometric algebra expression:

 ,
,
or, in 3D using dual cross product representation (also above). Note that the geometric algebra square of a vector equals the squared norm of that vector.
Additional background material on the calculation and applications of the reciprocal basis to nonorthonormal coordinate systems can be found in [1].
Reference
[1] A. Macdonald, Vector and Geometric Calculus, CreateSpace Independent Publishing Platform, 2012.
Permanent Citation
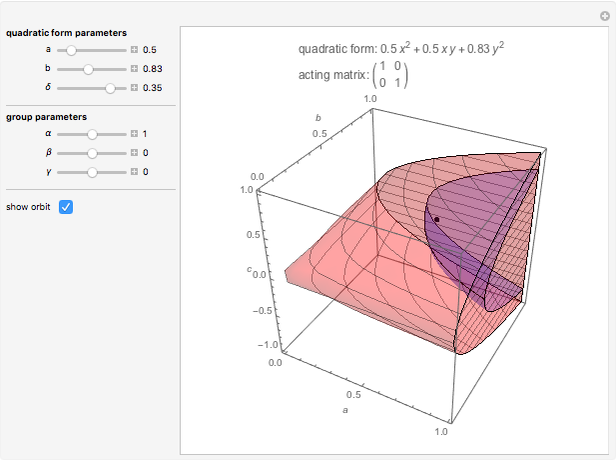 The Space of Inner Products
The Space of Inner Products
Andrzej Kozlowski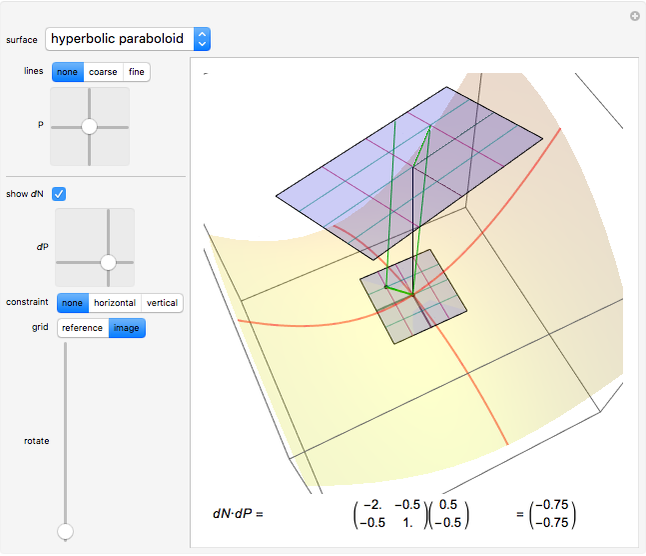 Exploring Surface Curvature and Differentials
Exploring Surface Curvature and Differentials
Michael Rogers (Oxford College of Emory University)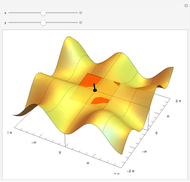 Tangent to a Surface
Tangent to a Surface
Jeff Bryant and Yu-Sung Chang Tangent Plane to a Sphere
Tangent Plane to a Sphere
Aaron Becker Volume under a Sphere Tangent to a Cone
Volume under a Sphere Tangent to a Cone
Abraham Gadalla Minimal and Maximal Surfaces Generated by the Holomorphic Function log(z)
Minimal and Maximal Surfaces Generated by the Holomorphic Function log(z)
Georgi Ganchev and Radostina Encheva Four Points Determine a Sphere
Four Points Determine a Sphere
Ed Pegg Jr Euler Angles for Space Shuttle
Euler Angles for Space Shuttle
S. M. Blinder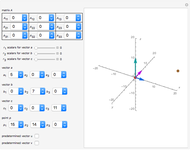 Sets of Linear Combinations and Their Images under Linear Transformations
Sets of Linear Combinations and Their Images under Linear Transformations
Hamide Dogan Normalizing Vectors
Normalizing Vectors
George Beck