Using Eigenvalue Analysis to Rotate in 3D




Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
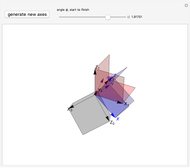
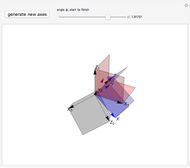
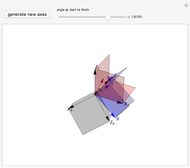
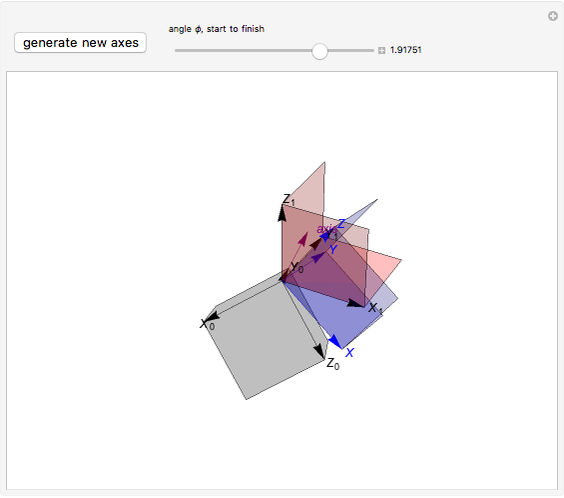
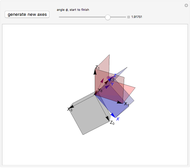
The continuous rotation of one right-handed coordinate system into another depends on the axis of rotation, the angle, and the sense of rotation. All these can be obtained from the eigenvalues and vectors of the change of basis matrix. (The matrix inverse gives only the end state of the rotation.) This Demonstration shows the axis of rotation and a slider that governs the rotation.
Contributed by: Raja Kountanya (December 2014)
Open content licensed under CC BY-NC-SA
Snapshots


Details

 ,
,
 .
.
The process [1] involves finding the eigenvalues and eigenvectors of  . The eigenvector corresponding to the eigenvalue of 1 gives the axis
. The eigenvector corresponding to the eigenvalue of 1 gives the axis  ; it is the only eigenvector whose components are all real. The two other eigenvalues are
; it is the only eigenvector whose components are all real. The two other eigenvalues are  and
and  , whose eigenvectors are complex.
, whose eigenvectors are complex.
Therefore, by suitably ordering the eigenvalues and eigenvectors with the real part of the eigenvalues, the vector can be deduced. That is, is the eigenvector of the eigenvalue whose real part is the maximum.
The value  is given by
is given by
 .
.
Suppose the sense of rotation is defined in the direction of using the value  defined as follows:
defined as follows:
 .
.
Take one of the complex eigenvectors  and let
and let  . Then
. Then
 .
.
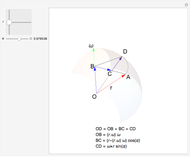
In this Demonstration, a random right-handed  coordinate system with gray planes is first generated. (You can generate a new system to see different cases.) The fixed
coordinate system with gray planes is first generated. (You can generate a new system to see different cases.) The fixed  system (red axes and planes) is generated by taking the inverse of the column matrix . Use the
system (red axes and planes) is generated by taking the inverse of the column matrix . Use the  slider to continuously rotate the system (blue axes and planes) about the vector (purple) into the system.
slider to continuously rotate the system (blue axes and planes) about the vector (purple) into the system.
Reference
[1] L. Sadun. Rotation in 3 Dimensions [Video]. (Nov 21, 2014) www.youtube.com/watch?v=5BtDR25TE8k.
Permanent Citation
 Formula for 3D Rotation
Formula for 3D Rotation
Izidor Hafner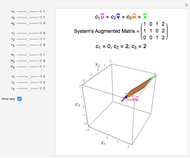 3D Vector Decomposition
3D Vector Decomposition
Mito Are and Valeria Antohe Commutativity of 3D Vector Addition
Commutativity of 3D Vector Addition
Izidor Hafner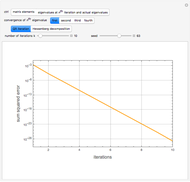 Computing Eigenvalues Using the QR Algorithm
Computing Eigenvalues Using the QR Algorithm
Housam Binous and Brian G. Higgins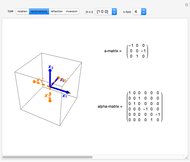 Coordinate Transformation of a-Matrix and alpha-Matrix
Coordinate Transformation of a-Matrix and alpha-Matrix
Robert McIntosh Vector Rotations in 3D
Vector Rotations in 3D
Stephen Wilkerson (Towson University) Eigenvalues, Curvature, and Quadratic Forms
Eigenvalues, Curvature, and Quadratic Forms
Chris Maes Iterated Matrix Operations in 3D
Iterated Matrix Operations in 3D
Ed Pegg Jr Roll a Sphere without Changing Orientation to a New Location in Two Straight Rolls
Roll a Sphere without Changing Orientation to a New Location in Two Straight Rolls
Aaron Becker Roll Any Point on the Sphere to Any Desired Latitude-Longitude Coordinates with One Straight-Line Roll
Roll Any Point on the Sphere to Any Desired Latitude-Longitude Coordinates with One Straight-Line Roll
Aaron Becker
-
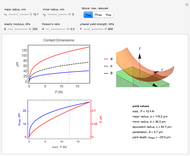 Yield under a Rigid Toroidal Indenter
Yield under a Rigid Toroidal Indenter
Raja Kountanya -
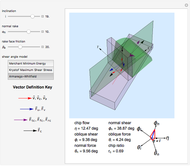 Shear-Angle Models for Oblique Metal Cutting
Shear-Angle Models for Oblique Metal Cutting
Raja Kountanya -
 Ray Tracing for Points in a Polygon
Ray Tracing for Points in a Polygon
Raja Kountanya -
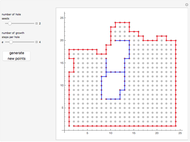 Boundary and Hole Detection
Boundary and Hole Detection
Raja Kountanya -
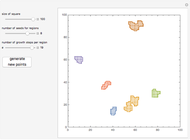 Component Identification and Boundary Delineation
Component Identification and Boundary Delineation
Raja Kountanya -
 Using Eigenvalue Analysis to Rotate in 3D
Using Eigenvalue Analysis to Rotate in 3D
Raja Kountanya -
 Chatter Stability with Orthogonal Rotation
Chatter Stability with Orthogonal Rotation
Raja Kountanya -
 Boundary Value Problems for Cone Geodesics
Boundary Value Problems for Cone Geodesics
Raja Kountanya