Abelian Algebras: Sums, Products, Duals, Powers

Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
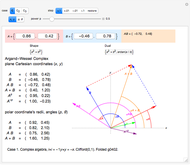
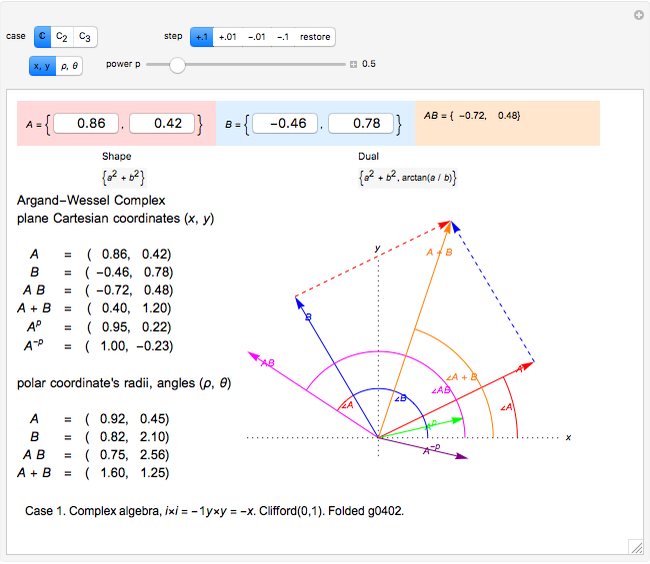
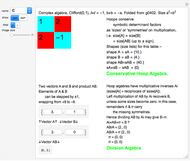
A vector is usually expressed in Cartesian coordinates  but can be converted (in Abelian algebras) to the same number of "dual" or "polar" coordinates
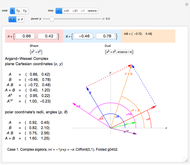
but can be converted (in Abelian algebras) to the same number of "dual" or "polar" coordinates  . Three cases of Abelian algebras are shown, based on the Abelian cyclic groups
. Three cases of Abelian algebras are shown, based on the Abelian cyclic groups  ,
,  (or
(or  ), and
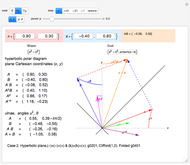
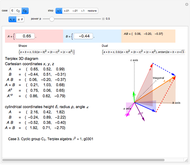
), and  . In each case, a twofold symmetry converts the unsigned group elements into half as many real
. In each case, a twofold symmetry converts the unsigned group elements into half as many real  ) vector elements via the minus sign, giving complex, hyperbolic, and terplex algebras, each with vector duals, division, powers, and roots.
) vector elements via the minus sign, giving complex, hyperbolic, and terplex algebras, each with vector duals, division, powers, and roots.
































Contributed by: Roger Beresford (March 2011)
Open content licensed under CC BY-NC-SA
Snapshots


Details
Vector addition is widely used; it can be visualized as attaching the tail of one vector to the head of another. Vector multiplication gives a directed area in two dimensions, but is not so simple in higher dimensions. Products and powers of complex numbers are complex numbers, and provide 2D vector multiplication, division, and powers. 3D geometry is non-Abelian, requiring the use of Clifford algebras, so 3D Abelian vector multiplication is not widely applicable.  and
and  are division algebras, but have "real divisors of zero". When
are division algebras, but have "real divisors of zero". When  (the black diagonal lines) the inverse would become infinite, were it not for the "projection" of the calculation into a sub-algebra of reduced symmetry. In , infinite inverses correspond to
(the black diagonal lines) the inverse would become infinite, were it not for the "projection" of the calculation into a sub-algebra of reduced symmetry. In , infinite inverses correspond to  or
or  being zero. The multiplication procedure used here (hoopTimes) "factors out" any zeros, "projecting" the result into a sub-algebra while "rejecting" a remainder.
being zero. The multiplication procedure used here (hoopTimes) "factors out" any zeros, "projecting" the result into a sub-algebra while "rejecting" a remainder.
Permanent Citation
 Algebraic Loops (2); Symmetry-Conserving Vector-Division Hoop Algebras
Algebraic Loops (2); Symmetry-Conserving Vector-Division Hoop Algebras
Roger Beresford All Possible Sums and Differences of Powers
All Possible Sums and Differences of Powers
Michael Trott Trigrams and Real Clifford Algebras
Trigrams and Real Clifford Algebras
Simon Tyler The Fundamental Theorem of Finite Abelian Groups
The Fundamental Theorem of Finite Abelian Groups
Marc Brodie (Wheeling Jesuit University) Dot Product
Dot Product
Bruce Torrence Rotating by Powers of i
Rotating by Powers of i
Michael Schreiber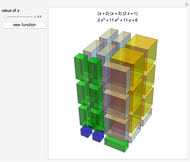 3D Algebra Blocks
3D Algebra Blocks
David L. Srebnick Octonion Algebra Multiplication Tables
Octonion Algebra Multiplication Tables
Michael Schreiber The Fundamental Theorem of Algebra
The Fundamental Theorem of Algebra
Ed Pegg Jr Algebraic Loops (1); Properties
Algebraic Loops (1); Properties
Roger Beresford
-
 Abelian Algebras: Sums, Products, Duals, Powers
Abelian Algebras: Sums, Products, Duals, Powers
Roger Beresford -
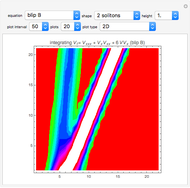 Blip Solitons
Blip Solitons
Roger Beresford -
 Rotating Cubes about Axes of Symmetry; 3D Rotation Is Non-Abelian
Rotating Cubes about Axes of Symmetry; 3D Rotation Is Non-Abelian
Roger Beresford -
 Projective Planes of Low Order
Projective Planes of Low Order
Roger Beresford -
Algebraic Loops (2); Symmetry-Conserving Vector-Division Hoop Algebras
Roger Beresford -
 Cayley Tables for Small Groups and Moufang Loops
Cayley Tables for Small Groups and Moufang Loops
Roger Beresford -
Algebraic Loops (1); Properties
Roger Beresford -
 Travelling Pulses (Wave Packets)
Travelling Pulses (Wave Packets)
Roger Beresford