Degrees of Freedom of a Moving Rigid Body





Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
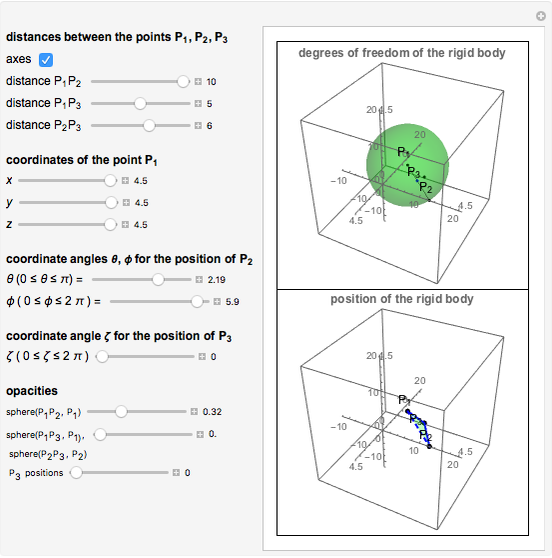
This Demonstration explains how six coordinates can describe the position of a moving rigid body. Varying the six coordinates for the position of the body (three for the position of a point of the body and three for the orientation of the body), it is possible to observe the corresponding displacement of the rigid body.
Contributed by: Luca Mannella (January 2014)
Open content licensed under CC BY-NC-SA
Snapshots





Details
Consider three points  ,
,  ,
,  of a moving rigid body of a given shape. Six coordinates are necessary and sufficient to describe the position of the rigid body. The distances between the three points (as well as the distances between any pair of points of the rigid body) are left unchanged by the motion, and the rigidity condition fixes the number of degrees of freedom of the body to six. For example, in a given frame of reference, the position of a rigid body can be described by three coordinates for the position of the point
of a moving rigid body of a given shape. Six coordinates are necessary and sufficient to describe the position of the rigid body. The distances between the three points (as well as the distances between any pair of points of the rigid body) are left unchanged by the motion, and the rigidity condition fixes the number of degrees of freedom of the body to six. For example, in a given frame of reference, the position of a rigid body can be described by three coordinates for the position of the point  (or of any other point of the body) and three angles (
(or of any other point of the body) and three angles ( ,
,  ,
,  ) for its orientation (or, more precisely, for the position of , relative to ).
) for its orientation (or, more precisely, for the position of , relative to ).
The distances between the points , , have to satisfy the triangle inequalities; each of the distances has to be less than or equal to the sum of the other two distances; for example,  . Also, each of the distances has to be greater than or equal to the positive difference of the other two distances; for example,
. Also, each of the distances has to be greater than or equal to the positive difference of the other two distances; for example,  . If these conditions are not satisfied, the two yellow spheres (one with center at of radius
. If these conditions are not satisfied, the two yellow spheres (one with center at of radius  and the other with center of radius
and the other with center of radius  ) do not intersect.
) do not intersect.
is the zenith angle between the segment  and the
and the  axis.
axis.
is the azimuthal angle between the projection of on the  -
- plane and the axis.
plane and the axis.
The angle for the position of  is the rotation around the segment
is the rotation around the segment  .
.
Varying (within the specified range for , , ) the six coordinates , , , , , , it is possible to obtain any position of the rigid triangle  and consequently any position of a rigid body of fixed shape around that triangle.
and consequently any position of a rigid body of fixed shape around that triangle.
Permanent Citation
 Binet's Ellipsoid
Binet's Ellipsoid
Enrique Zeleny Block on a Frictionless Inclined Plane
Block on a Frictionless Inclined Plane
Fernand Brunschwig and Joe Bolte Mechanical Work
Mechanical Work
Enrique Zeleny Rotation and Translation of a Rigid Body
Rotation and Translation of a Rigid Body
Enrique Zeleny Roll a Sphere without Changing Orientation to a New Location in Two Straight Rolls
Roll a Sphere without Changing Orientation to a New Location in Two Straight Rolls
Aaron Becker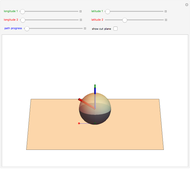 Roll Any Point on the Sphere to Any Desired Latitude-Longitude Coordinates with One Straight-Line Roll
Roll Any Point on the Sphere to Any Desired Latitude-Longitude Coordinates with One Straight-Line Roll
Aaron Becker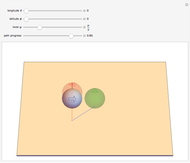 Re-Orient a Sphere with Two Straight Rolls
Re-Orient a Sphere with Two Straight Rolls
Aaron Becker Restricted Three-Body Problem in 3D
Restricted Three-Body Problem in 3D
Enrique Zeleny Restricted Three-Body Problem
Restricted Three-Body Problem
Robert M Lurie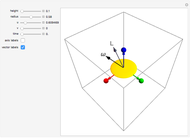 Angular Momentum of a Rotating Rigid Body
Angular Momentum of a Rotating Rigid Body
Frederick W. Strauch
