Desynchronization Dynamics of Two Coupled Oscillators



Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
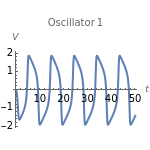
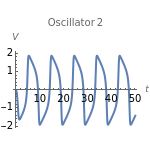
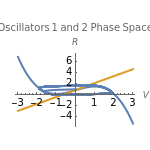
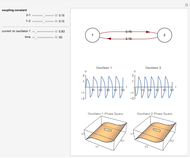
Neurons and neuronal networks can be modeled at many different levels, depending upon the phenomena one is modeling and the accuracy desired. In this Demonstration, neurons are considered as nonlinear phase oscillators that fire action potentials in accordance with the FitzHugh–Nagumo equations, two differential equations that are a simplification of the more biophysically involved Hodgkin–Huxley equations. Two neurons are initially synchronized trivially by being uncoupled. Interesting dynamical behavior can be observed when the neurons are coupled, both by excitation and inhibition. This behavior can be observed on a voltage-time axis for each neuron as well as in a state space, in which the trajectory about the equilibrium point is shown in either two or three dimensions.
Contributed by: Garrett Neske (March 2011)
Open content licensed under CC BY-NC-SA
Snapshots
Details
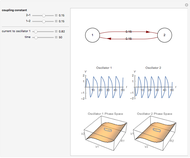
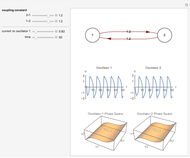
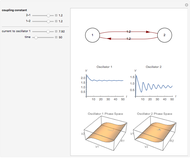
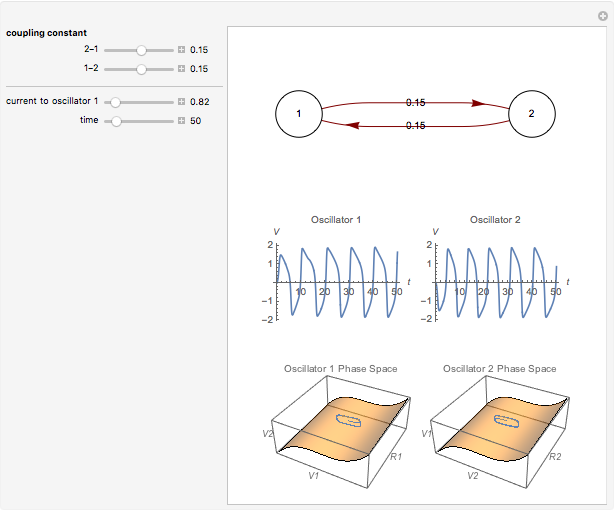
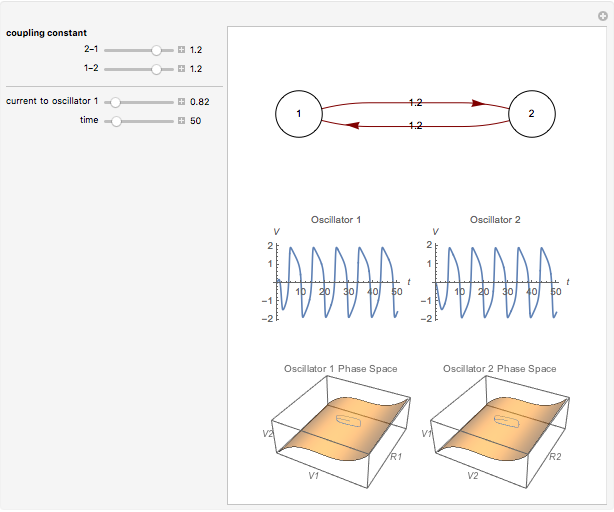
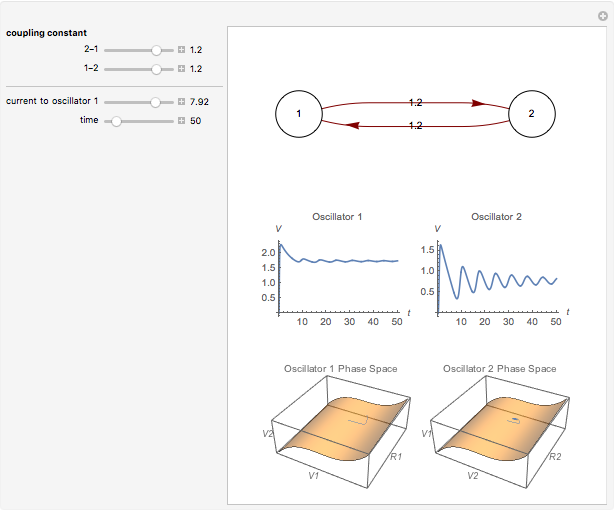
The two neurons are initially uncoupled and synchronized. When uncoupled, each neuron is a two-dimensional system described by a voltage ( ) and a recovery variable (
) and a recovery variable ( ), the latter of which describes the extent to which a neuron can change its voltage in time. Equilibrium points for this system are defined by the intersection of two nullclines in two-dimensional state space. Since the two neurons begin in synchronous oscillation, a limit cycle exists about the equilibrium point. The neurons may be coupled by two coupling constants, which may be either positive (excitatory) or negative (inhibitory). One of the neurons also receives an external current input. In this case, the state space for each neuron becomes three-dimensional. Only one nullcline, a cubic surface, is shown, with the trajectory of each oscillator also plotted. Interesting dynamics can be seen by varying the coupling constants, input current, and time of the trajectory. Certain attractors of the system include multiple limit cycles, stable fixed-nodes, and sometimes even chaotic dynamics.
), the latter of which describes the extent to which a neuron can change its voltage in time. Equilibrium points for this system are defined by the intersection of two nullclines in two-dimensional state space. Since the two neurons begin in synchronous oscillation, a limit cycle exists about the equilibrium point. The neurons may be coupled by two coupling constants, which may be either positive (excitatory) or negative (inhibitory). One of the neurons also receives an external current input. In this case, the state space for each neuron becomes three-dimensional. Only one nullcline, a cubic surface, is shown, with the trajectory of each oscillator also plotted. Interesting dynamics can be seen by varying the coupling constants, input current, and time of the trajectory. Certain attractors of the system include multiple limit cycles, stable fixed-nodes, and sometimes even chaotic dynamics.
Permanent Citation
"Desynchronization Dynamics of Two Coupled Oscillators"
http://demonstrations.wolfram.com/DesynchronizationDynamicsOfTwoCoupledOscillators/
Wolfram Demonstrations Project
Published: March 7 2011
 Kuramoto Model for Phase Locking of Coupled Oscillators
Kuramoto Model for Phase Locking of Coupled Oscillators
Jessica Alfonsi Neuronal Bursting
Neuronal Bursting
Garrett Neske Stochastic Rock-Paper-Scissors Population Dynamics
Stochastic Rock-Paper-Scissors Population Dynamics
Martin Weidl Modeling Parasitoid-Host Dynamics with Delay Differential Equations
Modeling Parasitoid-Host Dynamics with Delay Differential Equations
Ferdinand Pfab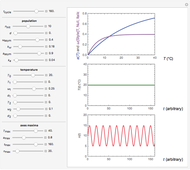 Effects of Temperature Fluctuations on Oscillating Biological Systems
Effects of Temperature Fluctuations on Oscillating Biological Systems
Mark D. Normand and Micha Peleg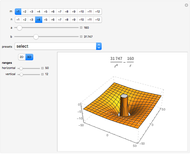 Attraction and Repulsion in Dynamical Systems
Attraction and Repulsion in Dynamical Systems
Stefan Ganev Rigid Body Pendulum on a Flywheel
Rigid Body Pendulum on a Flywheel
Nasser M. Abbasi Bead on a Rotating Wire
Bead on a Rotating Wire
Ryan K. Smith (Wolfram Research) Reactive Collision Dynamics in Two Dimensions
Reactive Collision Dynamics in Two Dimensions
John A. Parkhill and Eric J. Sundstrom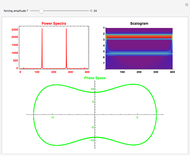 Dynamical Behavior of a Duffing Oscillator
Dynamical Behavior of a Duffing Oscillator
Satya Mohapatra
-
 Solving the Cable Equation
Solving the Cable Equation
Garrett Neske -
 Burgers Turbulence
Burgers Turbulence
Garrett Neske -
 Inviscid Burgers's Equation
Inviscid Burgers's Equation
Garrett Neske -
 Boolean NK Networks
Boolean NK Networks
Garrett Neske -
Neuronal Bursting
Garrett Neske -
 Desynchronization Dynamics of Two Coupled Oscillators
Desynchronization Dynamics of Two Coupled Oscillators
Garrett Neske -
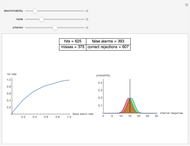 Signal Detection Theory
Signal Detection Theory
Garrett Neske -
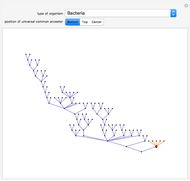 The Tree of Life
The Tree of Life
Garrett Neske -
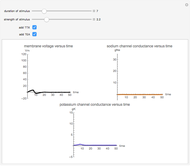 Neural Impulses: The Action Potential in Action
Neural Impulses: The Action Potential in Action
Garrett Neske