First- and Second-Order Transfer Functions




Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
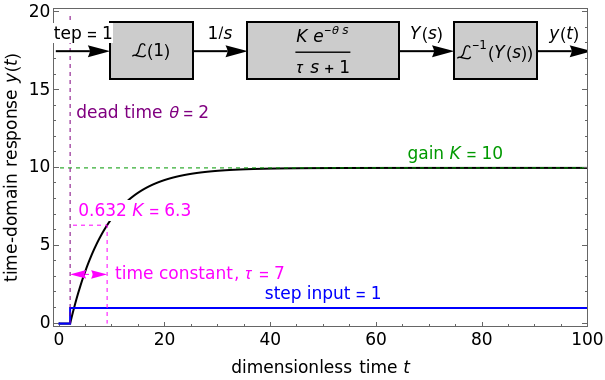
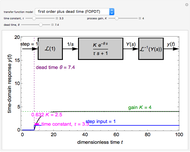
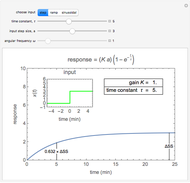
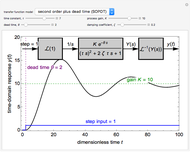
This Demonstration plots the time-domain response of a system with a step input of unity. Select either a first-order plus dead time (FOPDT) model or a second-order plus dead time (SOPDT) model. Set the time constant  to change how quickly the system reaches a new steady state, the process gain
to change how quickly the system reaches a new steady state, the process gain  to change how aggressively the system responds to the unity step input and the dead time
to change how aggressively the system responds to the unity step input and the dead time  that delays the system response by a value of
that delays the system response by a value of  . For the second-order process, change the damping coefficient
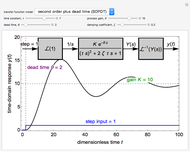
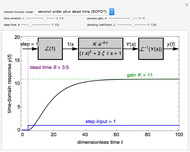
. For the second-order process, change the damping coefficient  with a slider. The damping coefficient is a measure of the magnitude of damping, which affects the degree of oscillation in the response. Dimensionless time is used.
with a slider. The damping coefficient is a measure of the magnitude of damping, which affects the degree of oscillation in the response. Dimensionless time is used.
Contributed by: Rachael L. Baumann and Adam J. Johnston (September 2017)
Additional contributions by: John L. Falconer
(University of Colorado Boulder, Department of Chemical and Biological Engineering)
Open content licensed under CC BY-NC-SA
Snapshots



Details
The general first-order transfer function in the Laplace domain is:
 ,
,
where  is the process gain,
is the process gain,  is the time constant,
is the time constant,  is the system dead time or lag and
is the system dead time or lag and  is a Laplace variable. The process gain is the ratio of the output response to the input (unit step for this Demonstration), the time constant determines how quickly the process responds or how rapidly the output changes and the dead time delays the system response by the amount
is a Laplace variable. The process gain is the ratio of the output response to the input (unit step for this Demonstration), the time constant determines how quickly the process responds or how rapidly the output changes and the dead time delays the system response by the amount  .
.
This Demonstration converts from the Laplace domain to the time domain for a step-response input. For a first-order transfer function, the time-domain response is:
 .
.
The general second-order transfer function in the Laplace domain is:
 ,
,
where  is the (dimensionless) damping coefficient.
is the (dimensionless) damping coefficient.
For a step-response input, the time-domain response for various damping coefficients are:
Overdamped ( ):
):
 .
.
Critically damped ( ):
):
 .
.
Underdamped ( ):
):
 .
.
Reference
[1] D. E. Seborg, D. A. Mellichamp, T. F. Edgar and F. J. Doyle, III, Process Dynamics and Control, 3rd ed., Hoboken: John Wiley & Sons, 2011 pp. 76, 81.
Permanent Citation
 First-Order Transfer Functions in Process Control
First-Order Transfer Functions in Process Control
Simon M. Lane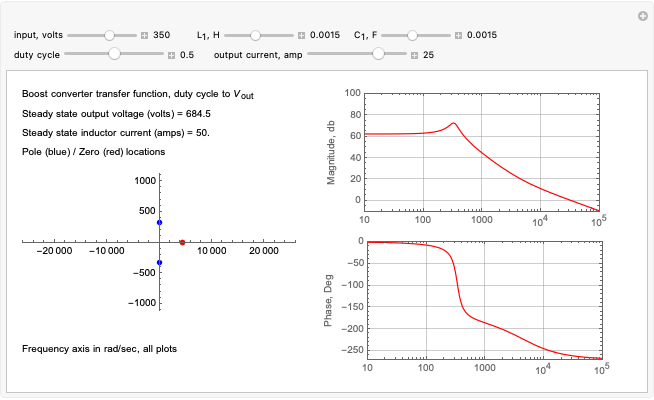 Transfer Function for Continuous-Mode Boost Converter
Transfer Function for Continuous-Mode Boost Converter
Gary Baker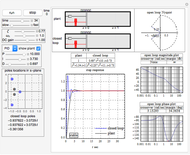 Simulation of Feedback Control System with Controller and Second-Order Plant
Simulation of Feedback Control System with Controller and Second-Order Plant
Nasser M. Abbasi Inverted Pendulum Controls
Inverted Pendulum Controls
Stephen Wilkerson (Towson University) and Nathan Slegers (University of Alabama, Huntsville) with contributions by Franz Brandhuber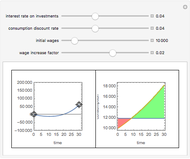 Optimal Consumption Paths
Optimal Consumption Paths
Seth J. Chandler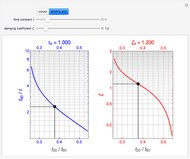 Smith's Second-Order Method in Process Dynamics
Smith's Second-Order Method in Process Dynamics
Housam Binous, Mohammad Mozahar Hossain, and Ahmed Bellagi Harmonic Distortion of Nonlinear Transfer Functions
Harmonic Distortion of Nonlinear Transfer Functions
Carsten Roppel Reliability Analysis and Failure Probability Using First-Order Reliability Method
Reliability Analysis and Failure Probability Using First-Order Reliability Method
Diego M. Oviedo Salcedo Minimizing the Rosenbrock Function
Minimizing the Rosenbrock Function
Michael Croucher Static Longitudinal Stability of Fixed Wing Aircraft
Static Longitudinal Stability of Fixed Wing Aircraft
Suba Thomas
-
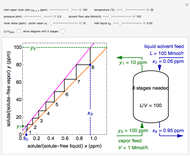 Operation of an Absorption Column
Operation of an Absorption Column
Adam J. Johnston -
 Feed Stages in a Distillation Column
Feed Stages in a Distillation Column
Adam J. Johnston -
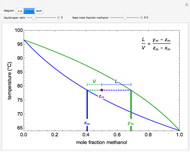 T-x-y and x-y Diagrams for Binary Vapor-Liquid Equilibrium (VLE) in Flash Drum
T-x-y and x-y Diagrams for Binary Vapor-Liquid Equilibrium (VLE) in Flash Drum
Adam J. Johnston -
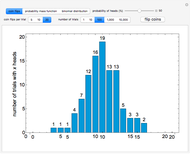 Binomial Distribution via Coin Flips
Binomial Distribution via Coin Flips
Adam J. Johnston -
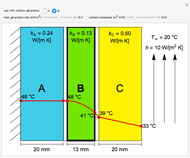 Heat Generation and Conduction through Composite Walls
Heat Generation and Conduction through Composite Walls
Adam J. Johnston -
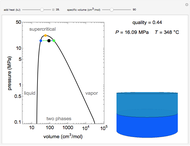 Pressure-Volume Diagram for Heating a Vapor-Liquid Mixture at a Constant Volume
Pressure-Volume Diagram for Heating a Vapor-Liquid Mixture at a Constant Volume
Adam J. Johnston -
 First- and Second-Order Transfer Functions
First- and Second-Order Transfer Functions
Adam J. Johnston -
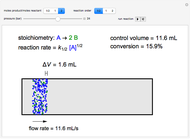 Volumetric Flow Rates in a Plug Flow Reactor
Volumetric Flow Rates in a Plug Flow Reactor
Adam J. Johnston -
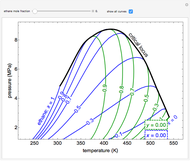 Pressure-Temperature Diagram for a Binary Mixture
Pressure-Temperature Diagram for a Binary Mixture
Adam J. Johnston -
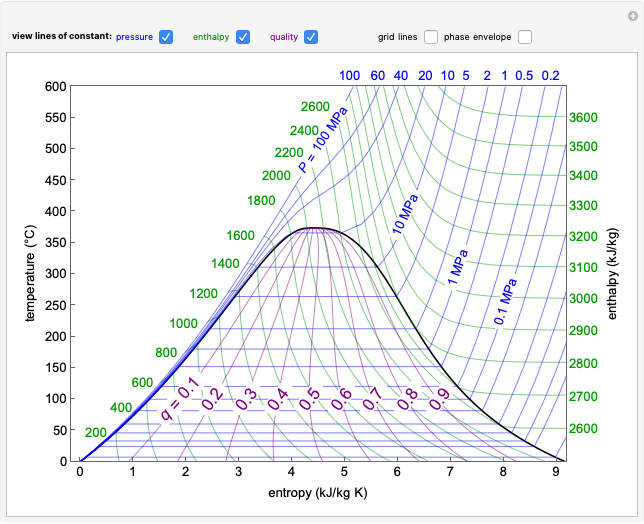 Temperature-Entropy Diagram for Water
Temperature-Entropy Diagram for Water
Adam J. Johnston -
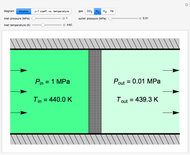 Joule-Thomson Expansion
Joule-Thomson Expansion
Adam J. Johnston