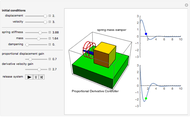
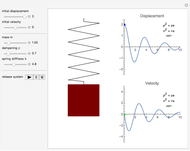
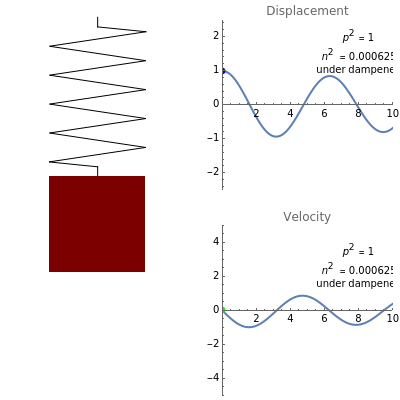
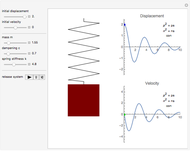
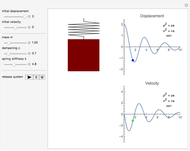
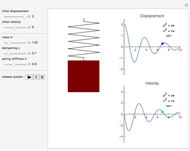
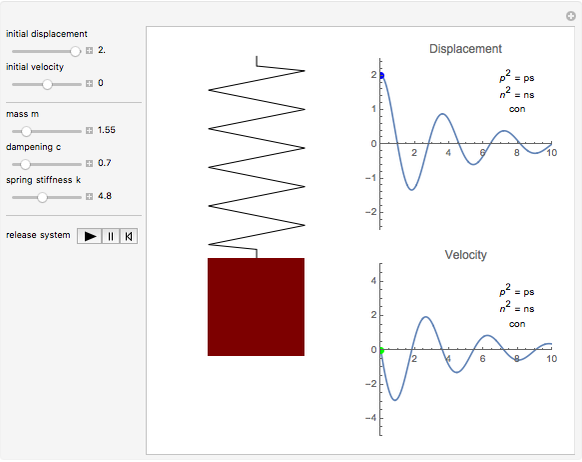
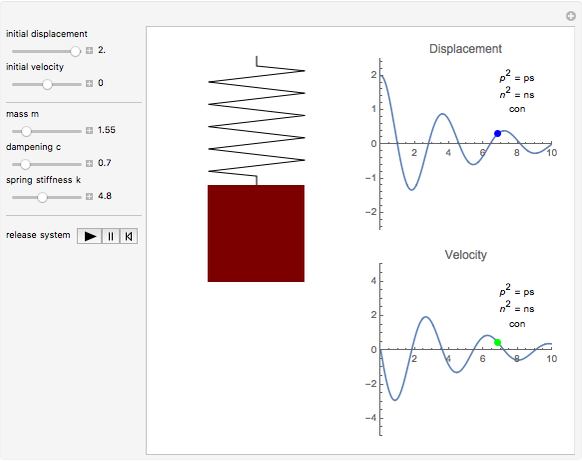
Free Vibrations of a Spring-Mass-Damper System



Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
The derivation here follows the usual form given in [1], in which  ,
,  , and
, and  are the mass, damping coefficient, and spring stiffness, respectively. The variable in this system is
are the mass, damping coefficient, and spring stiffness, respectively. The variable in this system is  . Applying Newton's second law gives the differential equation
. Applying Newton's second law gives the differential equation  , where
, where  and
and  .
.
Contributed by: Stephen Wilkerson (Army Research Laboratory and Towson University), Nathan Slegers (University of Alabama Huntsville), and Chris Arney (United States Military Academy, West Point) (March 2011)
Open content licensed under CC BY-NC-SA
Snapshots

Details
Reference:
[1] S. Timoshenko, D. Young, and W. Weaver Jr., Vibration Problems in Engineering, 4th ed., New York: John Wiley & Sons, 1990.
Permanent Citation
"Free Vibrations of a Spring-Mass-Damper System"
http://demonstrations.wolfram.com/FreeVibrationsOfASpringMassDamperSystem/
Wolfram Demonstrations Project
Published: March 7 2011
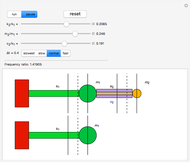 Tuned Mass Damper
Tuned Mass Damper
Nabil Fares Dynamics of a Double Spring Mass
Dynamics of a Double Spring Mass
Stephen Wilkerson (United States Military Academy West Point)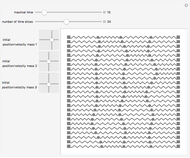 Time Evolution of a Four-Spring Three-Mass System
Time Evolution of a Four-Spring Three-Mass System
Michael Trott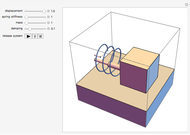 Simple Spring Mass Damping
Simple Spring Mass Damping
Stephen Wilkerson (Towson University)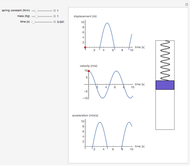 Mass on a Spring: Simple Harmonic Oscillator
Mass on a Spring: Simple Harmonic Oscillator
George Lejnine and Aaron Noble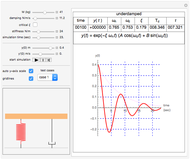 Free Response in a Second-Order System
Free Response in a Second-Order System
Nasser M. Abbasi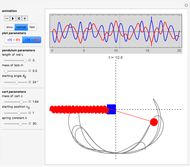 Spring-Cart-Pendulum System
Spring-Cart-Pendulum System
Erik Mahieu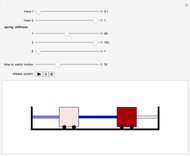 Motion of Two Masses Connected by Springs
Motion of Two Masses Connected by Springs
Sarah Lichtblau Two Masses with Forcing Functions Oscillating between Three Springs
Two Masses with Forcing Functions Oscillating between Three Springs
Stephen Wilkerson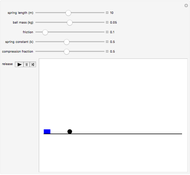 Spring-Launched Ball
Spring-Launched Ball
Divya Garg and Nimesh Chakravarthi