Generating 3D Figures with a Given Symmetry Group



Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
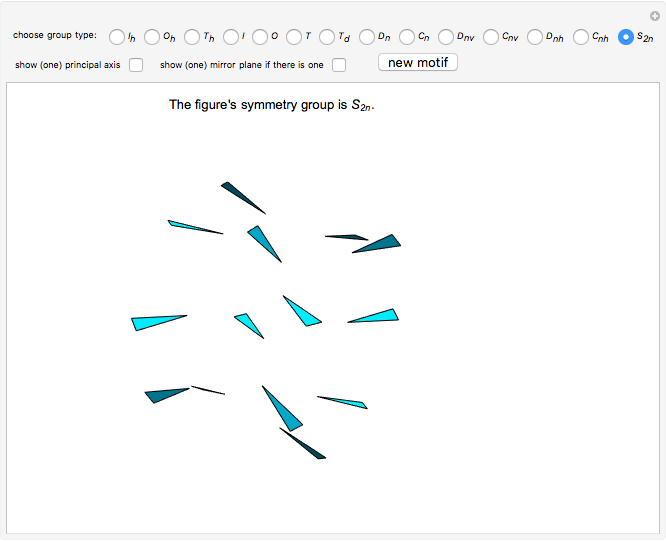
A symmetry of a figure is a transformation, such as a rotation, reflection, inversion, etc., that repositions the figure to be indistinguishable from the original. For example, rotating a circle about its center is a symmetry of the circle.
[more]
Contributed by: Izidor Hafner (December 2011)
Open content licensed under CC BY-NC-SA
Snapshots
Details
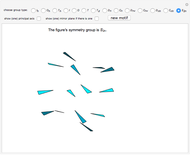
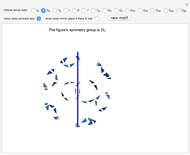
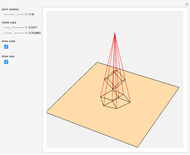
If the figure has only one rotational axis, there are the four possible kinds of symmetries, all cyclic:  (there is an axis of rotation and reflection, but there is no mirror plane),
(there is an axis of rotation and reflection, but there is no mirror plane),  (there is a mirror plane, but it is not perpendicular to the axis),
(there is a mirror plane, but it is not perpendicular to the axis),  (there is a mirror plane that is perpendicular to the axis), and
(there is a mirror plane that is perpendicular to the axis), and  (there is a glide reflection).
(there is a glide reflection).
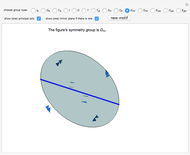
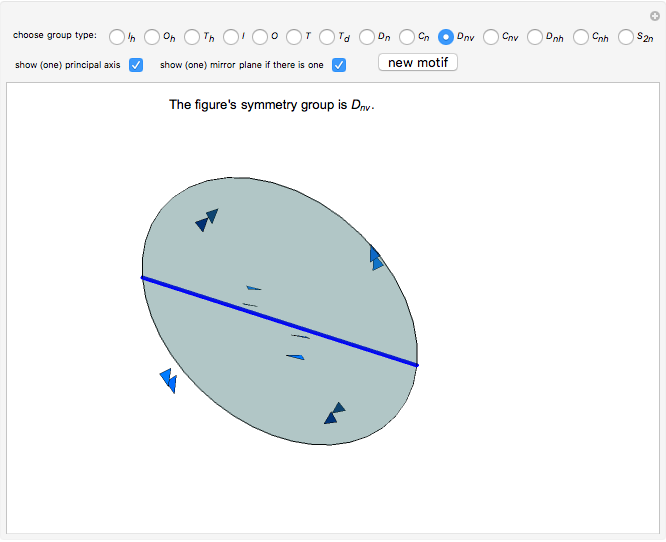
If the figure has more than one rotational axis but no more than one  -fold axis with
-fold axis with  , the possibilities are (dihedral symmetries):
, the possibilities are (dihedral symmetries):  (no mirror plane),
(no mirror plane),  (the mirror plane is not perpendicular to the principal axis),
(the mirror plane is not perpendicular to the principal axis),  (the mirror plane is perpendicular to the principal axis).
(the mirror plane is perpendicular to the principal axis).
The figure may have more than one 5-fold axis (icosahedral symmetry):  (rotations only),
(rotations only),  (there is a mirror plane).
(there is a mirror plane).
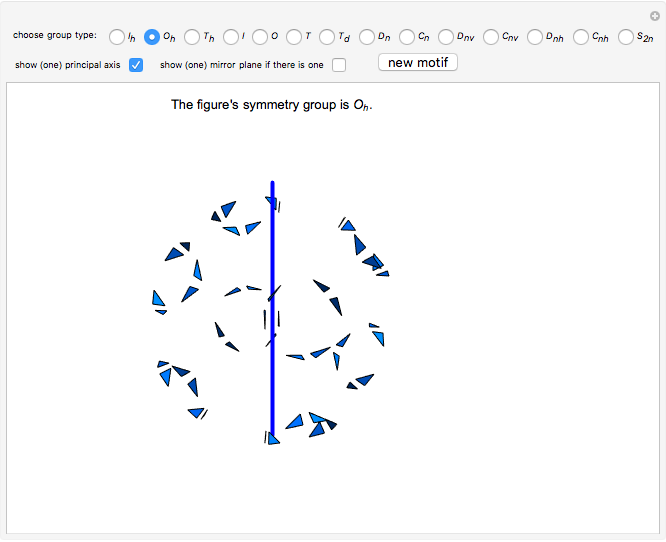
The figure may have more than one 4-fold axis (octahedral symmetry):  (rotations only),
(rotations only),  (there is a mirror plane).
(there is a mirror plane).
The figure may have more than one principal 3-fold axis (tetrahedral symmetry):  (rotations only),
(rotations only),  (there is a mirror plane, no inversion),
(there is a mirror plane, no inversion),  (there is a point of inversion).
(there is a point of inversion).
This Demonstration is a guessing game to learn about the 14 types of symmetry groups of figures that have a rotational axis.
Not demonstrated are the three symmetry groups with no rotational symmetry:  (asymmetric ),
(asymmetric ),  (only inversion), and
(only inversion), and  (only one mirror plane).
(only one mirror plane).
Reference
[1] P. R. Cromwell, Polyhedra, New York: Cambridge University Press, 1999 pp. 289–313. www.liv.ac.uk/~spmr02/book/index.html.
Permanent Citation
 GL(3,n) Acting on 3D Points
GL(3,n) Acting on 3D Points
Ed Pegg Jr The Spherical Patterns for Point Groups
The Spherical Patterns for Point Groups
Izidor Hafner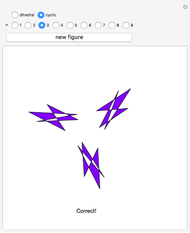 Guessing the Symmetry Group
Guessing the Symmetry Group
Izidor Hafner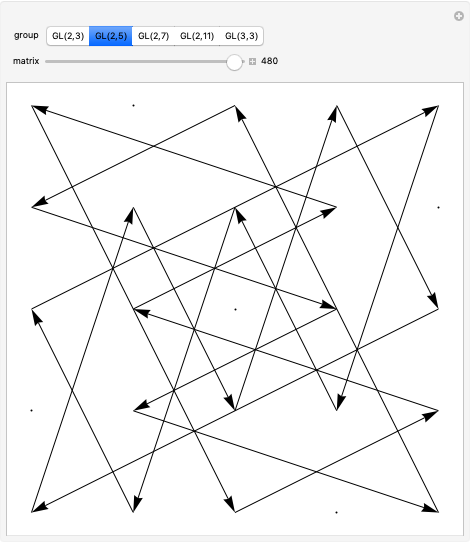 GL(2,p) and GL(3,3) Acting on Points
GL(2,p) and GL(3,3) Acting on Points
Ed Pegg Jr Guess the Wallpaper Group
Guess the Wallpaper Group
Izidor Hafner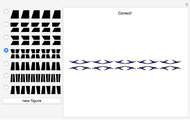 Guessing the Frieze Group
Guessing the Frieze Group
Izidor Hafner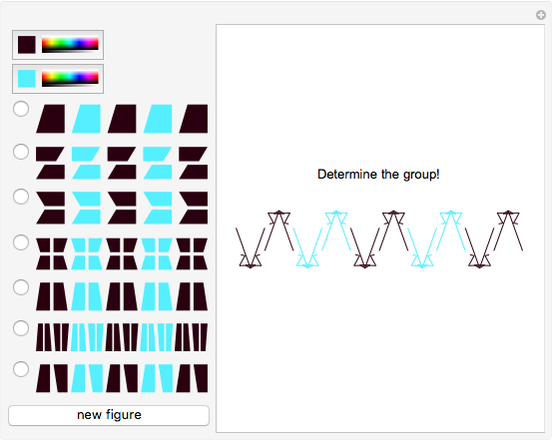 Guess the Antisymmetric Frieze Group, Part 1
Guess the Antisymmetric Frieze Group, Part 1
Izidor Hafner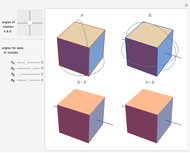 Combining Two 3D Rotations
Combining Two 3D Rotations
George Beck and Jeff Bryant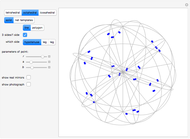 Making Kaleidoscopes
Making Kaleidoscopes
Izidor Hafner Matrix Representation of the Addition Group
Matrix Representation of the Addition Group
S. M. Blinder
-
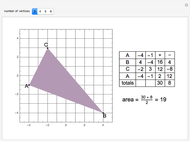 Area of a Polygon
Area of a Polygon
Izidor Hafner -
 Pappus's Hexagons
Pappus's Hexagons
Izidor Hafner -
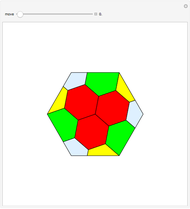 Freese's Dissection of a Regular Hexagon into Seven Hexagons
Freese's Dissection of a Regular Hexagon into Seven Hexagons
Izidor Hafner -
 A Construction of the Square Root of Seven
A Construction of the Square Root of Seven
Izidor Hafner -
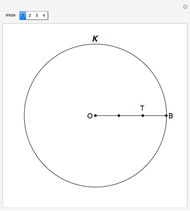
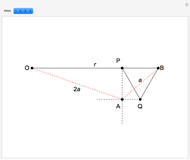
 The Apollonius Circle of a Triangle
The Apollonius Circle of a Triangle
Izidor Hafner -
 Freese's Dissection of a Regular Dodecagon into Six Squares
Freese's Dissection of a Regular Dodecagon into Six Squares
Izidor Hafner -
 Natural Language Neutral Symbolism in Propositional Logic
Natural Language Neutral Symbolism in Propositional Logic
Izidor Hafner -
 Regressive Recursion
Regressive Recursion
Izidor Hafner -
 Mazes on the Edges of a Polyhedron
Mazes on the Edges of a Polyhedron
Izidor Hafner -
 Deduce the Net for a Die's Net
Deduce the Net for a Die's Net
Izidor Hafner -
 Test Your Spatial Visualization Abilities
Test Your Spatial Visualization Abilities
Izidor Hafner -
 Op Art on Golden Rhombic Solids (II)
Op Art on Golden Rhombic Solids (II)
Izidor Hafner -
 Golden Rhombic Solids with Nets
Golden Rhombic Solids with Nets
Izidor Hafner -
 Sum of the Squares of the Sides of a Projected Regular Tetrahedron
Sum of the Squares of the Sides of a Projected Regular Tetrahedron
Izidor Hafner -
 Perspective Projection of a Cube onto a Plane
Perspective Projection of a Cube onto a Plane
Izidor Hafner -
 Op Art on Platonic Solids
Op Art on Platonic Solids
Izidor Hafner -
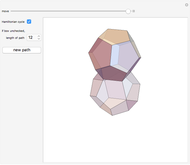 Rolling a Regular Dodecahedron on a Congruent Dodecahedron
Rolling a Regular Dodecahedron on a Congruent Dodecahedron
Izidor Hafner -
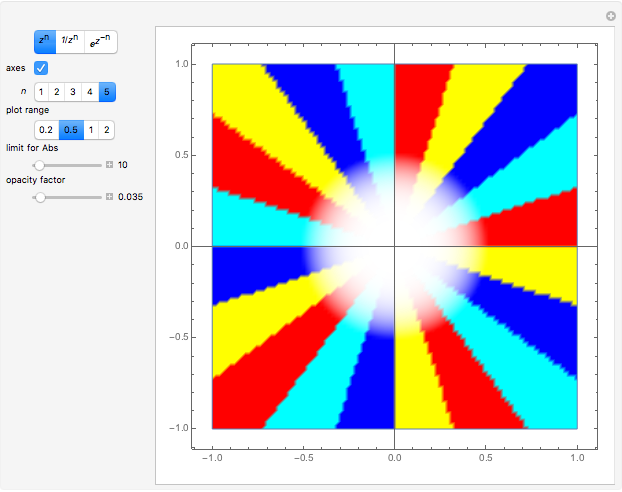 Zeros, Poles, and Essential Singularities
Zeros, Poles, and Essential Singularities
Izidor Hafner -
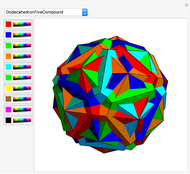 Polyhedral Compounds
Polyhedral Compounds
Izidor Hafner -
 Meissner Tetrahedra
Meissner Tetrahedra
Izidor Hafner