Heavy Spring with Double Pendulum

Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
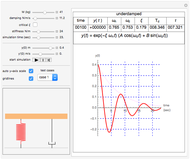
This Demonstration describes the dynamics of a pendulum made up of two springs. The top spring mass is taken into account in the dynamics using Raleigh's method while the lower spring is assumed to be massless. The pendulum bob slides back and forth; it is attached to the end of the lower massless spring. The bob has three degrees of freedom. The equations of motion for the bob and the pendulum are derived using the Lagrangian method and Mathematica's built-in function NDSolve is used to obtain a numerical solution.
Contributed by: Nasser M. Abbasi (October 2012)
Open content licensed under CC BY-NC-SA
Snapshots
Details
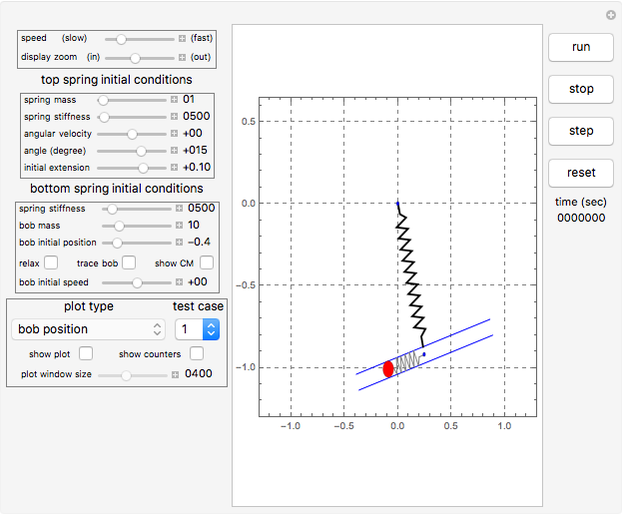
description of the user interface
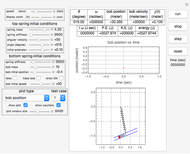
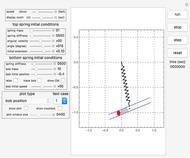
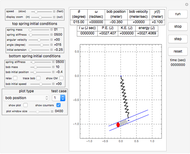
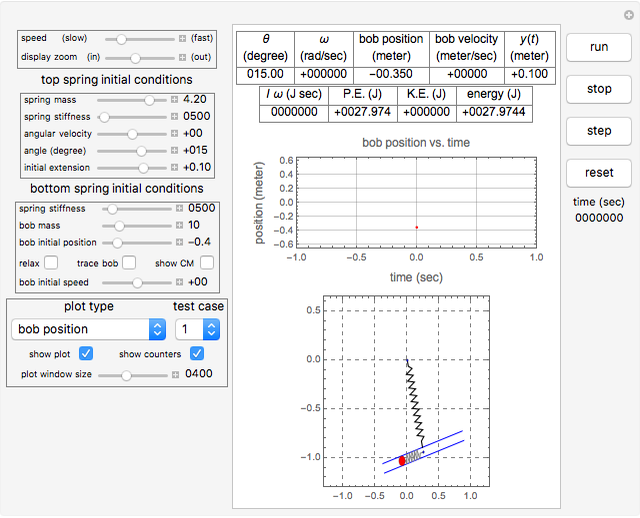
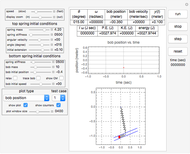
The four buttons on the right side are used to control the Demonstration. The reset button brings the Demonstration back to the initial conditions. There are two main sets of control variables. One set is for setting the initial conditions for the top spring, and the second set is used for setting the initial conditions for the lower spring. The "relax" check box for the lower spring is used to put the spring into the relaxed position. For the top spring the relaxed position is set at  , while the lower spring is assumed to have zero relaxed length located at the point where the two springs are joined. You can see a trace of the bob motion using the "trace" check box. You can see the location of the center of mass (CM) of the whole system using the "show CM" checkbox.
, while the lower spring is assumed to have zero relaxed length located at the point where the two springs are joined. You can see a trace of the bob motion using the "trace" check box. You can see the location of the center of mass (CM) of the whole system using the "show CM" checkbox.
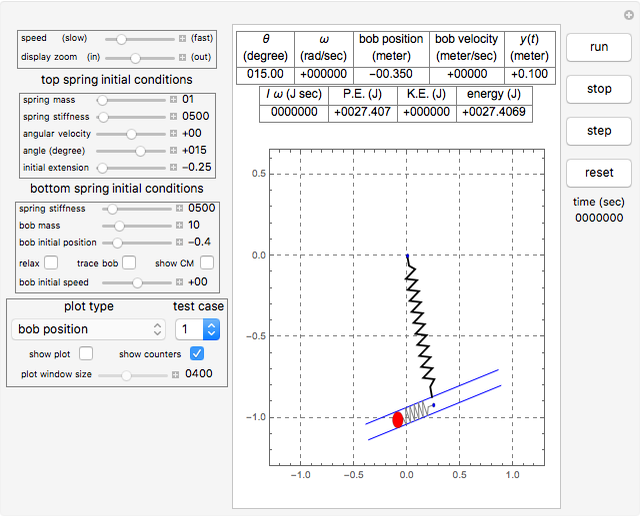
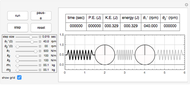
The result has three parts. The counters show the current state. The field labeled "energy" is the sum of the potential energy (P.E.) and the kinetic energy (K.E.). The field labeled  is the total angular momentum of the system. The field labeled
is the total angular momentum of the system. The field labeled  is the current extension of the top spring measured from its relaxed position. You can see different plots by selecting the plot type using the pop-up menu labeled "plot type". The main display shows the pendulum itself as it swings.
is the current extension of the top spring measured from its relaxed position. You can see different plots by selecting the plot type using the pop-up menu labeled "plot type". The main display shows the pendulum itself as it swings.
A pop-up menu labeled "test case" is used to select one of three preconfigured parameters. Click the run button after selecting a test case to start the Demonstration.
The Demonstration runs with no throttling by using a single dynamic variable called "gTick" that is updated at the end of each Manipulate expression evaluation so that the Manipulate expression is reevaluated again immediately. This lets the Demonstration run at the maximum speed. A slider labeled "speed" can be used to adjust the speed of the Demonstration as needed.
The Demonstration runs continuously until you stop it. All units used are in SI.
derivation of equations of motion
The equations of motion are derived using the Lagrangian procedure. Raleigh's method is used for the top spring such that the effective mass used is  of the top spring mass. This effective mass is added to the bob mass to account for the vertical displacement of the top spring. The bob has three degrees of freedom: the distance
of the top spring mass. This effective mass is added to the bob mass to account for the vertical displacement of the top spring. The bob has three degrees of freedom: the distance  is along the length of lower spring where
is along the length of lower spring where  is the location where the top pendulum attached to the lower pendulum, the angle of rotation
is the location where the top pendulum attached to the lower pendulum, the angle of rotation  and , the vertical displacement of the top spring. For more information on the derivation of the equations of motion, please see the author's report.
and , the vertical displacement of the top spring. For more information on the derivation of the equations of motion, please see the author's report.
References
[1] David Morin, Introduction to Classical Mechanics: With Problems and Solutions, New York: Cambridge University Press, 2008.
[2] REA's Problem Solver's Mechanics Static and Dynamics, New Jersey: Research and Education Association, 2002.
[3] D. A. Wells, Lagrangian Dynamics, New York: Schaums' Outline, 1967.
[4] S. Timoshenko, Vibration Problems In Engineering, New York: D. Van. Nostrand, 1937.
Permanent Citation
 Motion of Quadruple Pendulum
Motion of Quadruple Pendulum
Vighnesh Souda Solid Pendulum with a Spring-Mass System
Solid Pendulum with a Spring-Mass System
Nasser M. Abbasi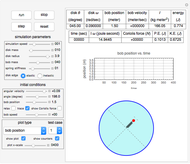 Spring-Mass System on a Rotating Table
Spring-Mass System on a Rotating Table
Nasser M. Abbasi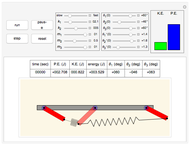 Three Pendulums Connected by Two Springs
Three Pendulums Connected by Two Springs
Nasser M. Abbasi Triple Pendulum
Triple Pendulum
Nasser M. Abbasi Pendulum Waves
Pendulum Waves
Stan Wagon (Macalester College) and S. M. Blinder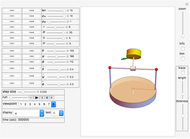 Spinning Disk Pendulum Swinging on Top of a Rotating Table
Spinning Disk Pendulum Swinging on Top of a Rotating Table
Nasser M. Abbasi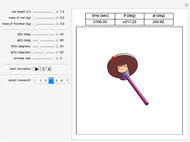 Rigid Body Pendulum on a Flywheel
Rigid Body Pendulum on a Flywheel
Nasser M. Abbasi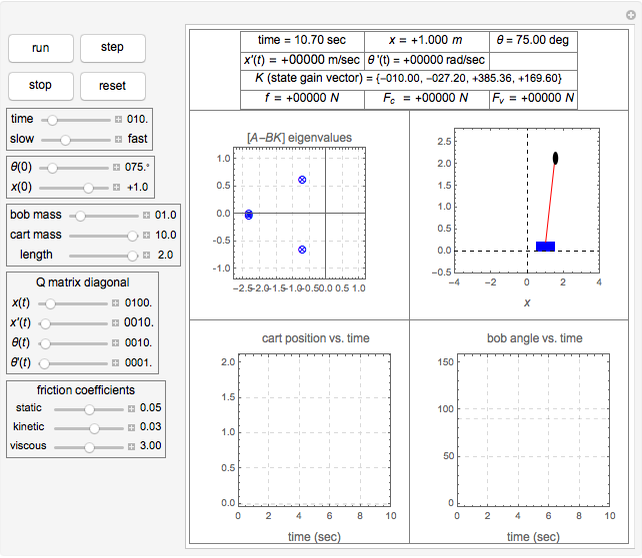 Linear Quadratic Regulator Control of an Inverted Pendulum with Friction
Linear Quadratic Regulator Control of an Inverted Pendulum with Friction
Nasser M. Abbasi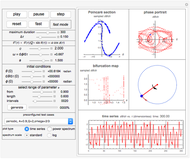 Chaotic Motion of a Damped Driven Pendulum: Bifurcation, Poincaré Map, Power Spectrum, and Phase Portrait
Chaotic Motion of a Damped Driven Pendulum: Bifurcation, Poincaré Map, Power Spectrum, and Phase Portrait
Nasser M. Abbasi
-
 Heavy Spring with Double Pendulum
Heavy Spring with Double Pendulum
Nasser M. Abbasi -
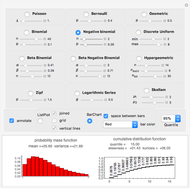 Illustrating the Use of Discrete Distributions
Illustrating the Use of Discrete Distributions
Nasser M. Abbasi -
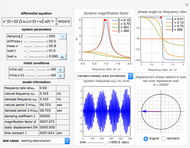 Dynamic Analysis of a Second-Order System with Harmonic Loading
Dynamic Analysis of a Second-Order System with Harmonic Loading
Nasser M. Abbasi -
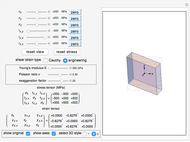 Cauchy and Engineering Strain Deformation in 3D
Cauchy and Engineering Strain Deformation in 3D
Nasser M. Abbasi -
 Dynamics of Two Cylinders with Three Springs
Dynamics of Two Cylinders with Three Springs
Nasser M. Abbasi -
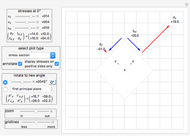 Principal Stresses and Mohr's Circle for Plane Stress
Principal Stresses and Mohr's Circle for Plane Stress
Nasser M. Abbasi -
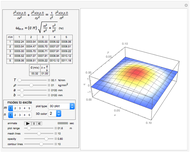
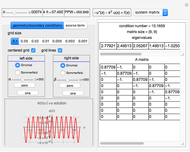
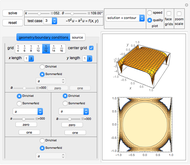
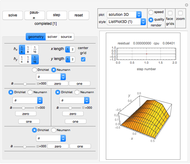 Solving the 2D Poisson PDE by Eight Different Methods
Solving the 2D Poisson PDE by Eight Different Methods
Nasser M. Abbasi -
 Vibration of a Rectangular Membrane
Vibration of a Rectangular Membrane
Nasser M. Abbasi -
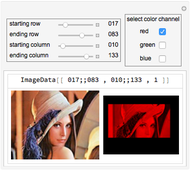 Selecting from ImageData Using Rows and Columns
Selecting from ImageData Using Rows and Columns
Nasser M. Abbasi -
Three Pendulums Connected by Two Springs
Nasser M. Abbasi -
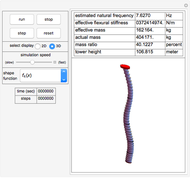 Wind Tower Structure Represented by Generalized Single Degree of Freedom
Wind Tower Structure Represented by Generalized Single Degree of Freedom
Nasser M. Abbasi -
 Free Response in a Second-Order System
Free Response in a Second-Order System
Nasser M. Abbasi -
Chaotic Motion of a Damped Driven Pendulum: Bifurcation, Poincaré Map, Power Spectrum, and Phase Portrait
Nasser M. Abbasi -
 Particle Motion Simulation Using A Priori Collision Detection
Particle Motion Simulation Using A Priori Collision Detection
Nasser M. Abbasi -
Spring-Mass System on a Rotating Table
Nasser M. Abbasi -
Solid Pendulum with a Spring-Mass System
Nasser M. Abbasi -
 Solving the Convection-Diffusion Equation in 1D Using Finite Differences
Solving the Convection-Diffusion Equation in 1D Using Finite Differences
Nasser M. Abbasi -
 Solving the Diffusion-Advection-Reaction Equation in 1D Using Finite Differences
Solving the Diffusion-Advection-Reaction Equation in 1D Using Finite Differences
Nasser M. Abbasi -
 Solving the 1D Helmholtz Differential Equation Using Finite Differences
Solving the 1D Helmholtz Differential Equation Using Finite Differences
Nasser M. Abbasi -
 Solving the 2D Helmholtz Partial Differential Equation Using Finite Differences
Solving the 2D Helmholtz Partial Differential Equation Using Finite Differences
Nasser M. Abbasi