Human Walking Animation




Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
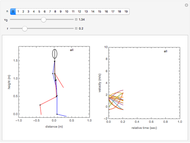
Human walking is animated using joint rotation and body translation algorithms developed by Boulic and Thalmann (BT). The BT algorithms have been adapted to enable the motion of a 3D stick figure. The dimensions of the stick figure are determined using anthropomorphic data from Winter. The motion of 19 body parts (points on the stick figure) are computed as a function of relative time in the human walk cycle. Model predictions are visually consistent with actual human walking. Predicted body part velocities from the BT model are consistent with actual radar and sonar micro-Doppler measurements.
Contributed by: Marshall Bradley (March 2011)
Open content licensed under CC BY-NC-SA
Snapshots


Details
The Boulic–Thalmann (BT) model is an empirical model of human walking based on the motion of an average human being. It was developed to provide computationally efficient tools for aiding computer animation. In the BT model, the body is represented as a stick figure. The components of motion that are addressed are: (1) pelvic roll, pitch, and yaw, (2) flexion of the knee, hip, and ankle, (3) yaw (or torsion) of the torso independent of the lower body (pelvis and legs), (4) flexion of the shoulder and elbow, and (5) three-component translation of the body as a whole.
The center of the body coordinate system is the spine center, a point located about 7 inches above the pelvis. The  axis is in the vertical direction and the
axis is in the vertical direction and the  axis points in the direction the individual is walking. The lower body is free to rotate in three directions (roll, pitch, and yaw) about the spine center. The torso is free to rotate about the spine center independently of the lower body. Flexion occurs at the hip, knee, and ankle for the right and left legs. Flexion occurs at the shoulder and elbow for the right and left arms. Left side and right side leg and arm motions are symmetrical. Additionally, the body translates about the spine center. In total there are twelve degrees of freedom.
axis points in the direction the individual is walking. The lower body is free to rotate in three directions (roll, pitch, and yaw) about the spine center. The torso is free to rotate about the spine center independently of the lower body. Flexion occurs at the hip, knee, and ankle for the right and left legs. Flexion occurs at the shoulder and elbow for the right and left arms. Left side and right side leg and arm motions are symmetrical. Additionally, the body translates about the spine center. In total there are twelve degrees of freedom.
One cycle of walking consists of two steps. It begins with left foot heel strike (HS), continues through right foot HS, left foot toe off (TO), and ends with the second HS of the left foot. In the BT model, the velocity of walking is nondimensionalized in terms of thigh height. If
 denotes the velocity of walking in m/s and
denotes the velocity of walking in m/s and  is the thigh height, then the relative velocity is
is the thigh height, then the relative velocity is  . Relative velocity is measured in units of “thigh height” per sec. Body height
. Relative velocity is measured in units of “thigh height” per sec. Body height  and thigh height
and thigh height  are related via
are related via  . An individual who is 6 feet tall (1.83 m) will have a thigh height of about 1 m. Boulic and Thalmann consider relative velocities in the range
. An individual who is 6 feet tall (1.83 m) will have a thigh height of about 1 m. Boulic and Thalmann consider relative velocities in the range  m/s. A brisk walk of about 4 mph corresponds to a relative velocity of about 1.7–1.8 m/s depending upon thigh height of the individual.
m/s. A brisk walk of about 4 mph corresponds to a relative velocity of about 1.7–1.8 m/s depending upon thigh height of the individual.
Time in the BT model is measured relative to the duration of the walk cycle  . This parameter is calculated using a form of Inman's law that states that
. This parameter is calculated using a form of Inman's law that states that  sec, where
sec, where  is the relative velocity. During the course of one walk cycle the relative time
is the relative velocity. During the course of one walk cycle the relative time  will vary between 0 and 1.
will vary between 0 and 1.
Use the upper two buttons on the graph to control the selection of the body height  and relative velocity
and relative velocity  . Increasing the relative velocity causes the stick figure to take longer steps. The lower button in the graph controls relative time
. Increasing the relative velocity causes the stick figure to take longer steps. The lower button in the graph controls relative time  in the walk cycle. Moving this button causes the stick figure to walk. The animation is presented in a coordinate system that moves with the walker.
in the walk cycle. Moving this button causes the stick figure to walk. The animation is presented in a coordinate system that moves with the walker.
[1] R. Boulic, N. Thalmann, and D. Thalmann, "A Global Human Walking Model with Real-Time Kinematic Personification," Visual Computer 6(6), 1990, pp. 344–358.
[2] M. Bradley, "A Mathematical Implementation of 'A Global Human Walking Model with Real-Time Kinematic Personification' by Boulic, Thalmann and Thalmann," Human, Light Vehicle and Tunnel Detection Workshop, June 16–17, 2009.
[3] V. Inman, H. Ralston, and F. Todd, Human Walking, Baltimore, Maryland: Williams & Wilkins, 1981.
[4] D. A. Winter, Biomechanics and Motor Control of Human Movement, 4th ed., New York: John Wiley and Sons, 2009.
Permanent Citation
 Micro-Doppler Sonar Simulation
Micro-Doppler Sonar Simulation
Marshall Bradley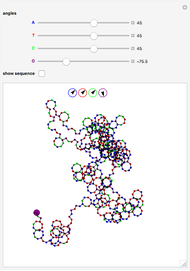 DNA Rotator Walk
DNA Rotator Walk
Paul-Jean Letourneau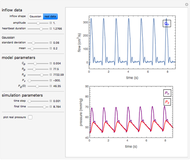 Windkessel Model for Hemodynamics in Arterial Systems
Windkessel Model for Hemodynamics in Arterial Systems
Mikel Landajuela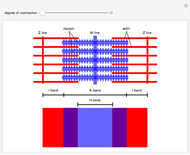 Sliding Filament Model of Muscle Contraction
Sliding Filament Model of Muscle Contraction
Stephanie Hu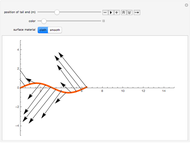 Model of Snake Locomotion by Frictional Forces
Model of Snake Locomotion by Frictional Forces
Christopher Umeki and Gregor Wettermann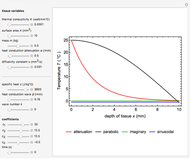 1D Heat Conduction through Biological Tissue
1D Heat Conduction through Biological Tissue
Muhamad Hamdi and Yusof Munajat Mechanics of the Chameleon Tongue
Mechanics of the Chameleon Tongue
Enrique Zeleny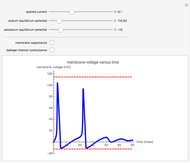 Minimal Hodgkin-Huxley Model: DC Stimulus
Minimal Hodgkin-Huxley Model: DC Stimulus
Qurat-ul-Ann (Anna) Mirza and Yogesh Joglekar Pivoting Polymer
Pivoting Polymer
Paul-Jean Letourneau and Sungchul Ji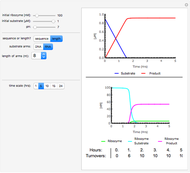 10-23 Deoxyribozyme Design Optimization
10-23 Deoxyribozyme Design Optimization
Brian M. Frezza
-
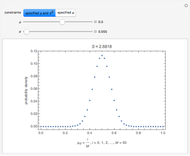
 Bayesian Distribution of Sample Mean
Bayesian Distribution of Sample Mean
Marshall Bradley -
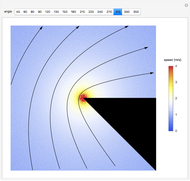 Fluid Flow around a Corner
Fluid Flow around a Corner
Marshall Bradley -
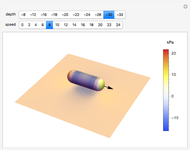 Underwater Vehicle Pressure Signature
Underwater Vehicle Pressure Signature
Marshall Bradley -
 Extreme Value Forecasting
Extreme Value Forecasting
Marshall Bradley -
 Target Motion with the Metropolis-Hastings Algorithm
Target Motion with the Metropolis-Hastings Algorithm
Marshall Bradley -
 Noise Temperature of a Radar System
Noise Temperature of a Radar System
Marshall Bradley -
 High-Frequency Sonar Performance
High-Frequency Sonar Performance
Marshall Bradley -
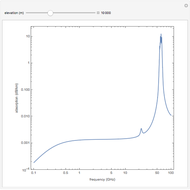 Atmospheric Radar Wave Absorption
Atmospheric Radar Wave Absorption
Marshall Bradley -
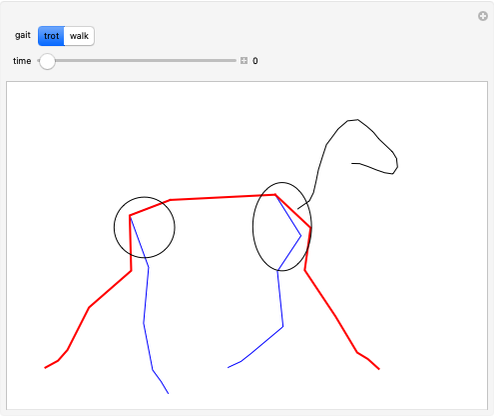 Equine Motion
Equine Motion
Marshall Bradley -
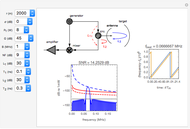 Frequency-Modulated Continuous-Wave (FMCW) Radar
Frequency-Modulated Continuous-Wave (FMCW) Radar
Marshall Bradley -
 Maximum Entropy Probability Density Functions
Maximum Entropy Probability Density Functions
Marshall Bradley -
 Uncertainty in Sonar Performance Prediction
Uncertainty in Sonar Performance Prediction
Marshall Bradley -
Micro-Doppler Sonar Simulation
Marshall Bradley -
 Human Walking Animation
Human Walking Animation
Marshall Bradley -
 Bayesian Range Weighting for Sonar
Bayesian Range Weighting for Sonar
Marshall Bradley