Measuring Distance and Orientation Using Camera and Lasers



Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
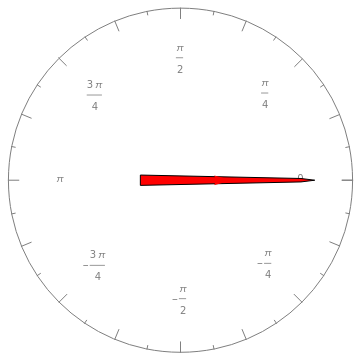
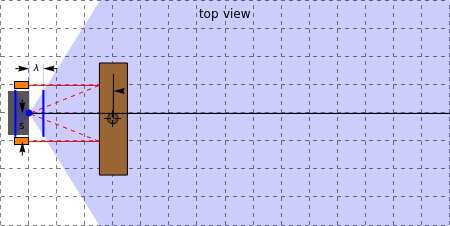
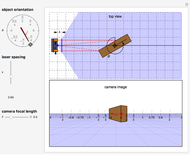
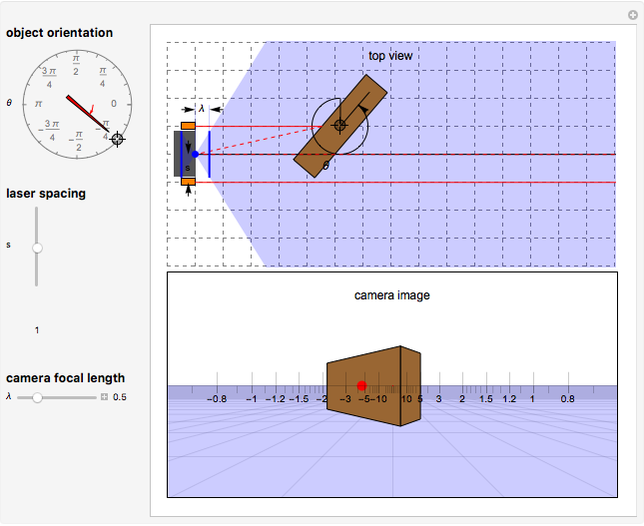
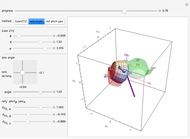
Distance to an object can be measured with a single camera and a laser, if the laser position relative to the camera is known. Usually the laser is pointed in the same direction as the camera and mounted a known distance from the camera. By dragging the locator, you can choose the orientation of the brown cuboid and two red lasers mounted  units to the left and right of a camera, which has a focal length
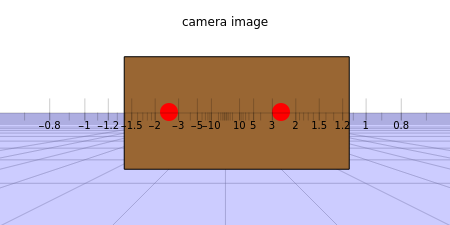
units to the left and right of a camera, which has a focal length  . These lasers can measure the distance to the cuboid, as shown by the reticule on the camera image. The cuboid's angle can be computed from two distance measurements.
. These lasers can measure the distance to the cuboid, as shown by the reticule on the camera image. The cuboid's angle can be computed from two distance measurements.
Contributed by: Shiva Shahrokhi and Aaron T. Becker (June 2016)
Open content licensed under CC BY-NC-SA
Snapshots
Details
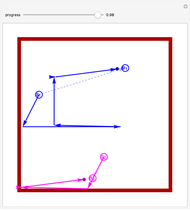
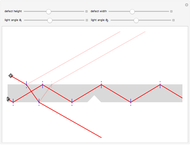
In a pinhole camera, light enters the camera through a tiny hole and illuminates the image plane. A pinhole camera has a focal length , the distance from the pinhole to the image plane. The pinhole is shown with a blue point and the image plane as a blue line. 3D points in the camera's coordinate frame  are converted to image plane coordinates
are converted to image plane coordinates  according to the formula:
according to the formula:
 , where
, where  .
.
All lines parallel to the camera frame's  axis terminate at
axis terminate at  at the vanishing point
at the vanishing point  in the image plane.
in the image plane.
Lasers mounted at  and
and  that terminate at coordinates
that terminate at coordinates  and
and  have image plane coordinates
have image plane coordinates  and
and  .
.
Thus the distance to objects with image plane coordinates  and
and  gives camera frame coordinates
gives camera frame coordinates  and
and  .
.
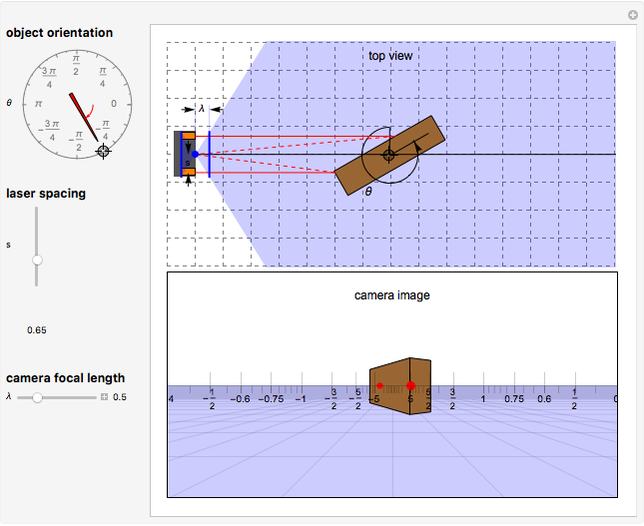
If both lasers strike the same object, the angle to the object is computed as  .
.
A camera's reticule (or graticule) is a net of fine lines in the scope. In this case, the reticule is aligned with the vanishing point of the lasers. The readings on the reticule directly measure the distance from the object to the camera.
Permanent Citation
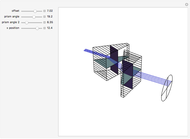 Anamorphic Prisms
Anamorphic Prisms
Ann Williamson and Donald Barnhart (Optica Software, a division of iCyt™ Mission Technology)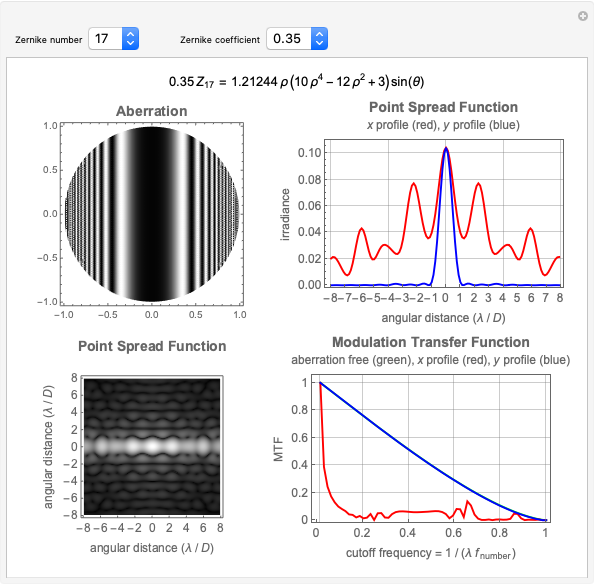 Point Spread and Modulation Transfer Functions of Zernike Wavefronts
Point Spread and Modulation Transfer Functions of Zernike Wavefronts
James C. Wyant He-Ne Laser
He-Ne Laser
Enrique Zeleny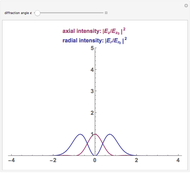 Radially Polarized Laser Beam Intensity Distributions
Radially Polarized Laser Beam Intensity Distributions
Yousef I. Salamin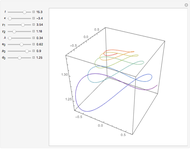 Maxwell-Bloch Equations for a Laser
Maxwell-Bloch Equations for a Laser
Enrique Zeleny Transient Response of a Semiconductor Laser
Transient Response of a Semiconductor Laser
Philippe Brosson Open and Closed Kaleidoscopes
Open and Closed Kaleidoscopes
Izidor Hafner Flexing a Polyhedral Periscope
Flexing a Polyhedral Periscope
Izidor Hafner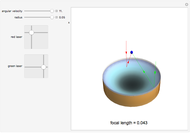 Liquid Mirror
Liquid Mirror
Sheldon Zhu Hypergeometric-Gaussian Modes
Hypergeometric-Gaussian Modes
Enrique Zeleny
-
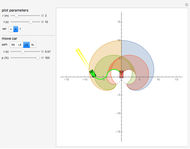
 Distribution of a Swarm of Robots in a Circular Workplace under Gravity
Distribution of a Swarm of Robots in a Circular Workplace under Gravity
Aaron T. Becker -
 Robot Manipulator Workspaces
Robot Manipulator Workspaces
Aaron T. Becker -
 The Homicidal Chauffeur Problem
The Homicidal Chauffeur Problem
Aaron T. Becker -
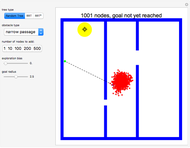 Rapidly Exploring Random Tree (RRT) and RRT*
Rapidly Exploring Random Tree (RRT) and RRT*
Aaron T. Becker -
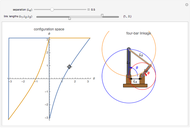 Configuration Space for Four-Bar Linkage
Configuration Space for Four-Bar Linkage
Aaron T. Becker -
 Isochrons for a Dubins Car
Isochrons for a Dubins Car
Aaron T. Becker -
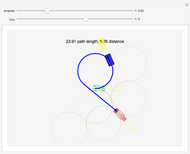 Shortest Path for the Dubins Car
Shortest Path for the Dubins Car
Aaron T. Becker -
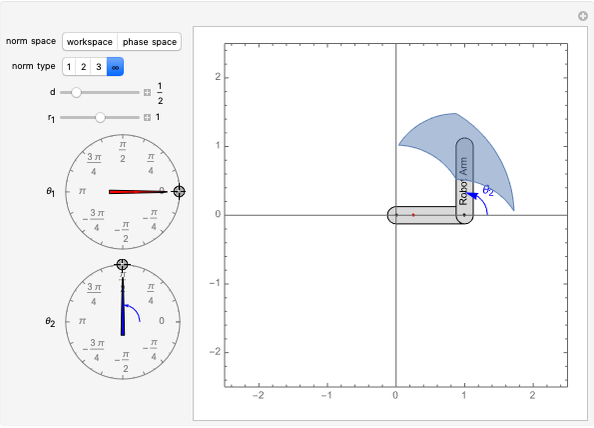 Distance Norms in Robot Workspace and Phase Space
Distance Norms in Robot Workspace and Phase Space
Aaron T. Becker -
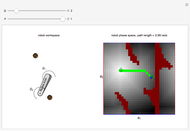 Breadth-First Search Robot Motion Planning
Breadth-First Search Robot Motion Planning
Aaron T. Becker -
 Spreading Particles in a Disk
Spreading Particles in a Disk
Aaron T. Becker -
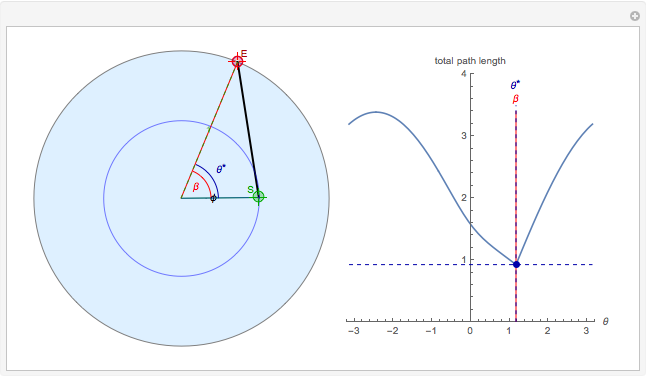 Shortest Path between Two Points in the Unit Disk Reflecting off the Circumference
Shortest Path between Two Points in the Unit Disk Reflecting off the Circumference
Aaron T. Becker -
 Three Parametrizations of Rotations
Three Parametrizations of Rotations
Aaron T. Becker -
 Moving Two Particles with Shared Control Inputs Using Wall Friction
Moving Two Particles with Shared Control Inputs Using Wall Friction
Aaron T. Becker -
 Compression Ratio of Spheres in a Curved Tube
Compression Ratio of Spheres in a Curved Tube
Aaron T. Becker -
 Common Robot Arm Configurations
Common Robot Arm Configurations
Aaron T. Becker -
 Distribution of a Robot Swarm in a Square under Gravity
Distribution of a Robot Swarm in a Square under Gravity
Aaron T. Becker -
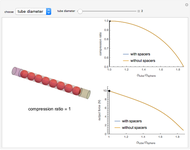 Transmitting Force through a Tube Filled with Spheres and Spacers
Transmitting Force through a Tube Filled with Spheres and Spacers
Aaron T. Becker -
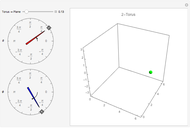 Chart for a Torus
Chart for a Torus
Aaron T. Becker -
 Defects in an Optical Fiber
Defects in an Optical Fiber
Aaron T. Becker -
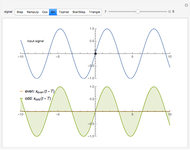 Synthesis with Even and Odd Functions
Synthesis with Even and Odd Functions
Aaron T. Becker