Three Parametrizations of Rotations




Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
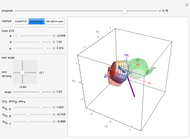
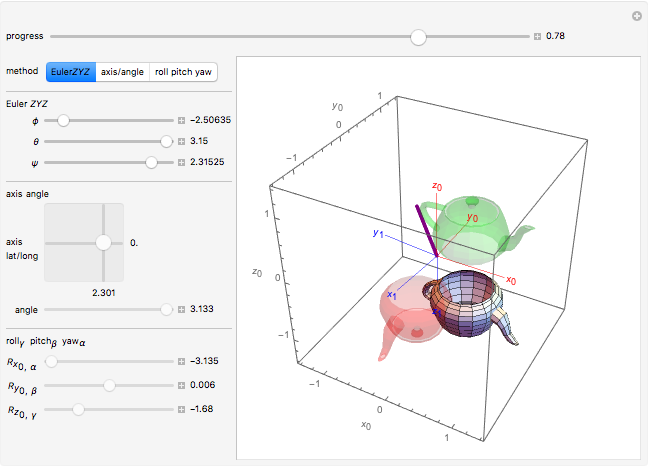
A rotation can be parameterized in several ways. This Demonstration compares three popular parametrizations:
[more]
Contributed by: Aaron T. Becker and Benedict Isichei (September 2017)
Open content licensed under CC BY-NC-SA
Snapshots

Details
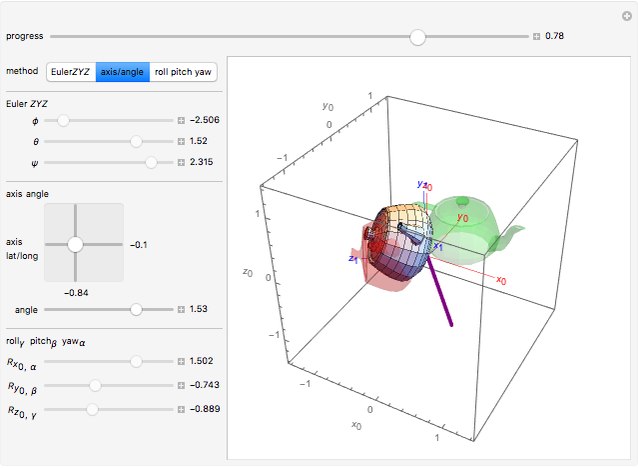
This Demonstration shows three parametrizations to describe rotations between a fixed coordinate frame  and a rotated frame
and a rotated frame  .
.
The first parametrization uses Euler angles. There are many Euler angle conventions. This Demonstration uses the  convention, which specifies the orientation of frame by three successive rotations. The first rotates about the
convention, which specifies the orientation of frame by three successive rotations. The first rotates about the  axis by the angle
axis by the angle  . Next, we rotate about the current
. Next, we rotate about the current  axis by the angle
axis by the angle  . Finally, we rotate about the current axis by the angle
. Finally, we rotate about the current axis by the angle  .
.
The composite rotation, using the shorthand convention of  for
for  and
and  for
for  , is
, is
 .
.
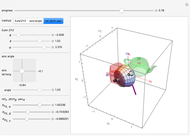
Euler's rotation theorem states that any combination of rotations of a rigid body, such that a point in the rigid body remains fixed, is equivalent to a single rotation about some axis that runs through the fixed point. The second parametrization uses axis/angle parametrization, a rotation of  about the unit axis
about the unit axis  . This again gives only three parameters, by representing
. This again gives only three parameters, by representing  by the two-parameter latitude/longitude pair:
by the two-parameter latitude/longitude pair:  . Using the convention
. Using the convention  :
:
 .
.
The final parametrization uses roll, pitch, and yaw angles, denoted as  ,
,  and
and  . The order of rotation in this Demonstration is around the fixed coordinate frame
. The order of rotation in this Demonstration is around the fixed coordinate frame  axes: first, a yaw about
axes: first, a yaw about  through an angle ; second, a pitch about
through an angle ; second, a pitch about  by an angle ; and third, a roll about
by an angle ; and third, a roll about  by an angle . Because the rotations are about the fixed coordinate frame, the successive rotations pre-multiply, giving the composite rotation
by an angle . Because the rotations are about the fixed coordinate frame, the successive rotations pre-multiply, giving the composite rotation
 .
.
Reference
[1] M. W. Spong, S. Hutchinson and M. Vidyasagar, Robot Modeling and Control, Hoboken, NJ: John Wiley & Sons, 2006.
Permanent Citation
 Roll Any Point on the Sphere to Any Desired Latitude-Longitude Coordinates with One Straight-Line Roll
Roll Any Point on the Sphere to Any Desired Latitude-Longitude Coordinates with One Straight-Line Roll
Aaron Becker Re-Orient a Sphere with Two Straight Rolls
Re-Orient a Sphere with Two Straight Rolls
Aaron Becker Roll a Sphere without Changing Orientation to a New Location in Two Straight Rolls
Roll a Sphere without Changing Orientation to a New Location in Two Straight Rolls
Aaron Becker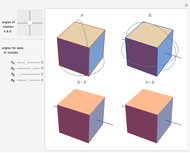 Combining Two 3D Rotations
Combining Two 3D Rotations
George Beck and Jeff Bryant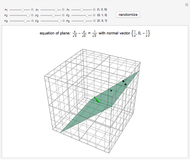 Three Points Determine a Plane
Three Points Determine a Plane
Ed Pegg Jr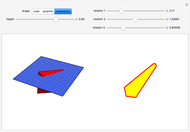 Cross Sections of Three Solids
Cross Sections of Three Solids
Matthias Wilder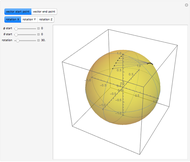 Vector Rotations in 3D
Vector Rotations in 3D
Stephen Wilkerson (Towson University)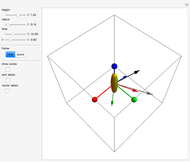 Free Precession of a Rotating Rigid Body
Free Precession of a Rotating Rigid Body
Frederick W. Strauch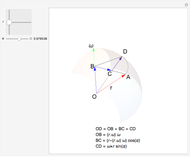 Formula for 3D Rotation
Formula for 3D Rotation
Izidor Hafner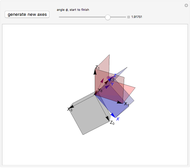 Using Eigenvalue Analysis to Rotate in 3D
Using Eigenvalue Analysis to Rotate in 3D
Raja Kountanya