Rotation with Zero Angular Momentum (The Square Cat)



Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
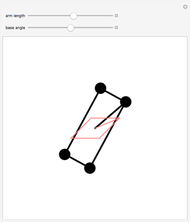
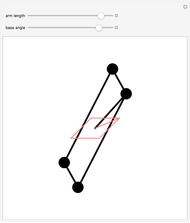
A deformable body can rotate itself using only internal forces—without any external torque, keeping its angular momentum zero. This is the case for a cat falling from a tree and landing on its feet. The four masses at the vertices of a parallelogram in this Demonstration can also rotate with only internal forces changing the parallelogram's base angle and arm length.
Contributed by: Oren Raz, Eli Putterman, and Yosi Avron (March 2011)
Open content licensed under CC BY-NC-SA
Snapshots




Details
This Demonstration is a simulation of a very simple "cat"—a deformable body that can change its orientation using only internal forces, enabling it to rotate while its total angular momentum is zero. This model was proposed by J. E. Avron and was studied in detail in E. Putterman and O. Raz, "The Square Cat," Am. J. Phys. 76(11), 2008 pp. 1040–1044. The four masses are connected with rods of zero mass. By applying internal forces only, the user can control the length of one pair of rods  and the base angle
and the base angle  of the parallelogram. Starting from a given shape, changing , then , changing to its original value, and then changing to its original value, also (all changes are done while keeping the angular momentum of the body zero), leads to a net rotation of the original shape.
of the parallelogram. Starting from a given shape, changing , then , changing to its original value, and then changing to its original value, also (all changes are done while keeping the angular momentum of the body zero), leads to a net rotation of the original shape.
Permanent Citation
 Angular Momentum of a Rotating Particle
Angular Momentum of a Rotating Particle
Frederick W. Strauch Angular Momentum of a Rotating Rigid Body
Angular Momentum of a Rotating Rigid Body
Frederick W. Strauch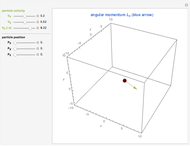 3D Angular Momentum of a Particle
3D Angular Momentum of a Particle
Sara McCaslin and Fredericka Brown Angular Velocity of a Compact Disc
Angular Velocity of a Compact Disc
Enrique Zeleny Rotation and Translation of a Rigid Body
Rotation and Translation of a Rigid Body
Enrique Zeleny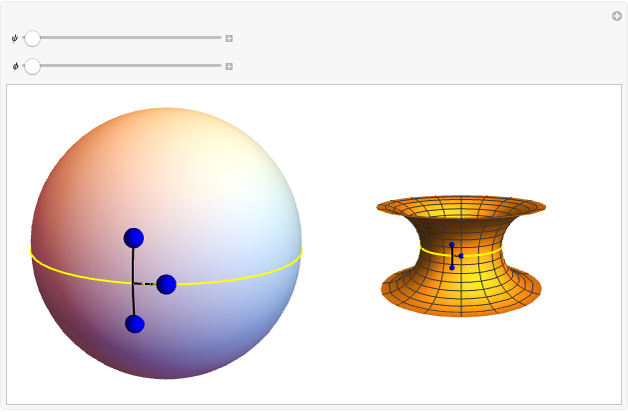 Swimming in Curved Space
Swimming in Curved Space
Oren Raz and Joseph E. Avron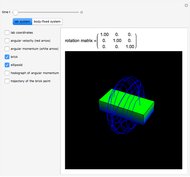 Free Rotation of an Asymmetric Top
Free Rotation of an Asymmetric Top
Ferat Talat oglu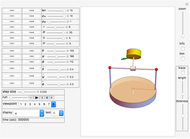 Spinning Disk Pendulum Swinging on Top of a Rotating Table
Spinning Disk Pendulum Swinging on Top of a Rotating Table
Nasser M. Abbasi Bead on a Rotating Wire
Bead on a Rotating Wire
Ryan K. Smith (Wolfram Research) Particle Moving on a Rotating Disk
Particle Moving on a Rotating Disk
Enrique Zeleny
