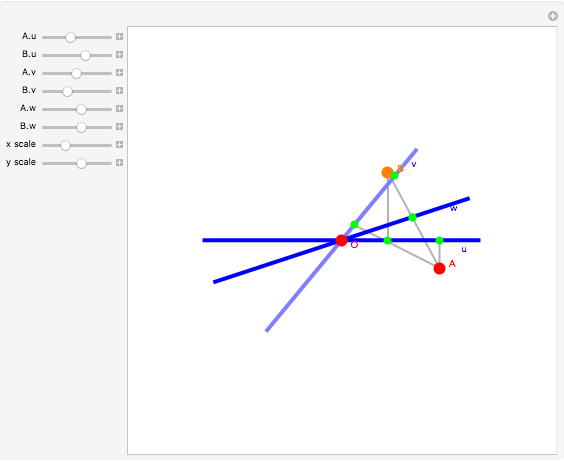
Ullman's Theorem in Two Dimensions




Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
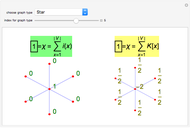
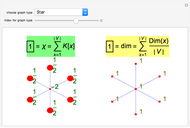
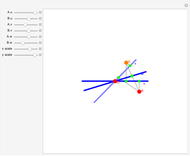
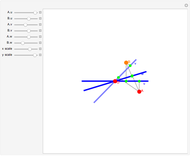
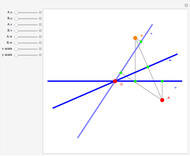
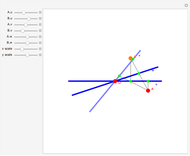
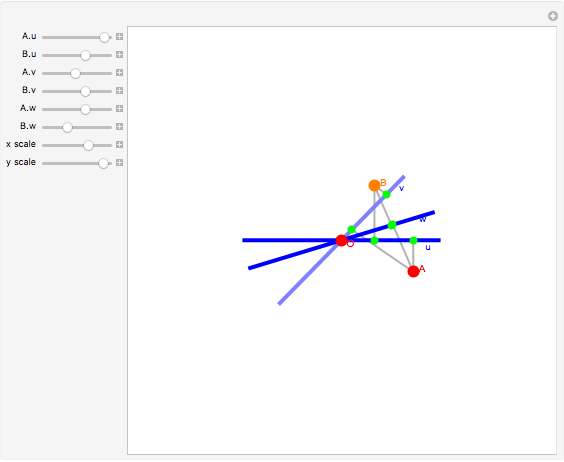
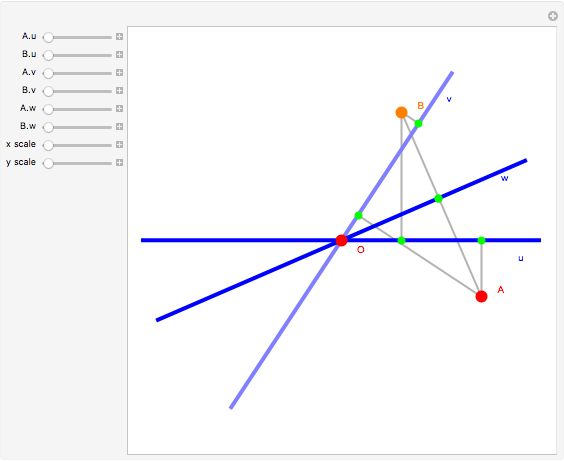
In the field of computer vision reconstructing an object using a video of its motion is known as the structure from motion problem. This Demonstration illustrates the reconstruction for three orthographic cameras and three points in the plane. The reconstruction is unique modulo the group of Euclidean transformations and reflections in the plane. The user can change the projection parameters. The inversion computes the camera and point configurations from these projections.
[more]








Contributed by: Oliver Knill (Harvard University) (March 2011)
Open content licensed under CC BY-NC-SA
Snapshots
Details
Based on work by: Oliver Knill and Jose Ramirez-Herran
See the author's page for more details.
Permanent Citation
"Ullman's Theorem in Two Dimensions"
http://demonstrations.wolfram.com/UllmansTheoremInTwoDimensions/
Wolfram Demonstrations Project
Published: March 7 2011
 Moiré Pattern of Two Fresnel Zone Plates
Moiré Pattern of Two Fresnel Zone Plates
James C. Wyant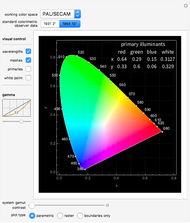 CIE Chromaticity Diagram
CIE Chromaticity Diagram
Yu-Sung Chang Gamma Correction
Gamma Correction
Michael Schreiber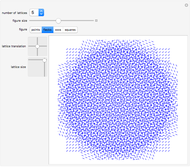 Overlapping Lattices of Figures
Overlapping Lattices of Figures
George Beck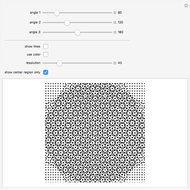 Moiré Patterns
Moiré Patterns
Stephen Wolfram Ordered Dither Patterns
Ordered Dither Patterns
Stephen Wolfram Error-Diffusion Dither Patterns
Error-Diffusion Dither Patterns
Stephen Wolfram Drawing a Line on a Digital Display
Drawing a Line on a Digital Display
Stephen Wolfram and Yu-Sung Chang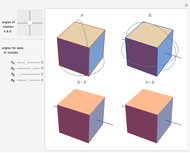 Combining Two 3D Rotations
Combining Two 3D Rotations
George Beck and Jeff Bryant Bézier Curve by de Casteljau's Algorithm
Bézier Curve by de Casteljau's Algorithm
Bruce Atwood