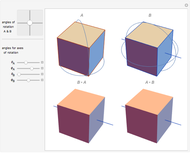
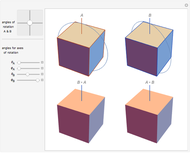
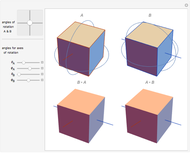
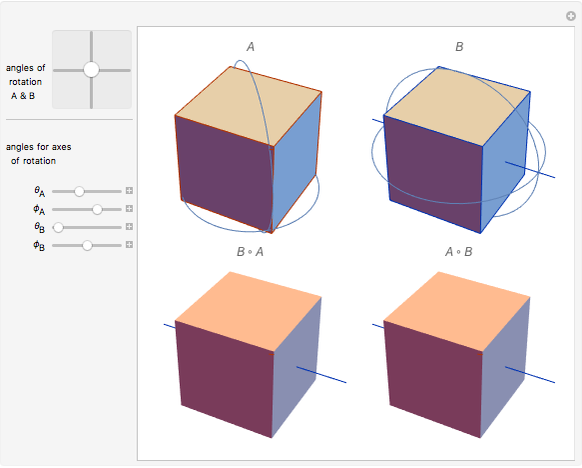
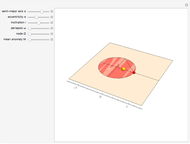
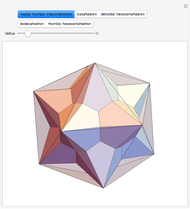
Combining Two 3D Rotations
Initializing live version







Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
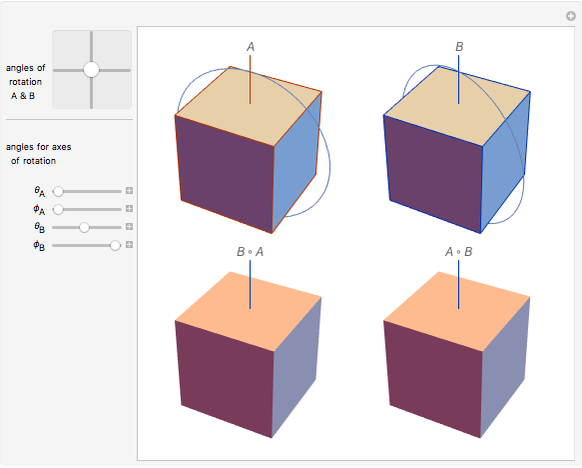
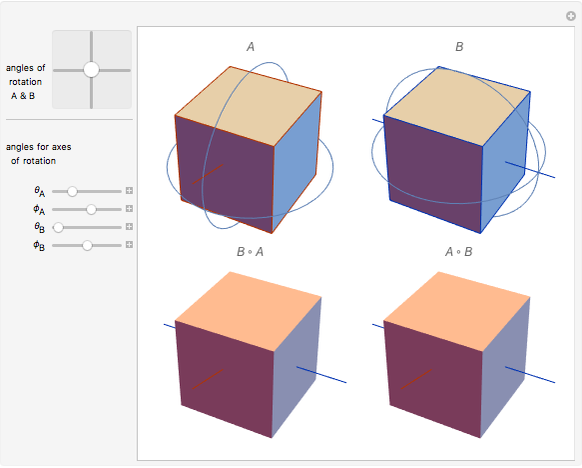
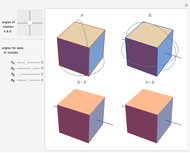
The concentric rotations  and
and  can be combined either by doing first and then , written as
can be combined either by doing first and then , written as  , or first and then , written as
, or first and then , written as  . This right-to-left notation comes from the algebra of dot products,
. This right-to-left notation comes from the algebra of dot products,  and
and  , where
, where  is a vector and
is a vector and  and
and  are the matrices representing the rotations and
are the matrices representing the rotations and  .
.

Contributed by: George Beck and Jeff Bryant (September 2007)
Open content licensed under CC BY-NC-SA
Snapshots
Details
Permanent Citation
Related Demonstrations
More by Author
 Rotational Symmetries of Platonic Solids
Rotational Symmetries of Platonic Solids
George Beck Rotating a Lattice of Points
Rotating a Lattice of Points
George Beck Rotational Symmetries of Colored Platonic Solids
Rotational Symmetries of Colored Platonic Solids
Marc Brodie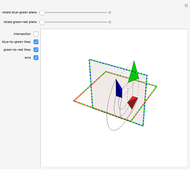 Reflecting in Intersecting Planes
Reflecting in Intersecting Planes
George Beck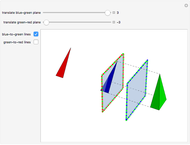 Reflecting in Parallel Planes
Reflecting in Parallel Planes
George Beck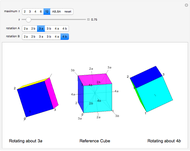 Rotating Cubes about Axes of Symmetry; 3D Rotation Is Non-Abelian
Rotating Cubes about Axes of Symmetry; 3D Rotation Is Non-Abelian
Roger Beresford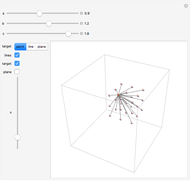 Projecting a Lattice of Points
Projecting a Lattice of Points
George Beck Reflecting a Lattice of Points
Reflecting a Lattice of Points
George Beck Roll a Sphere without Changing Orientation to a New Location in Two Straight Rolls
Roll a Sphere without Changing Orientation to a New Location in Two Straight Rolls
Aaron Becker Reflecting in Intersecting Lines
Reflecting in Intersecting Lines
George Beck
-
 Combining Two 3D Rotations
Combining Two 3D Rotations
Jeff Bryant -
 Keplerian Orbital Elements
Keplerian Orbital Elements
Jeff Bryant -
 Colored Lights
Colored Lights
Jeff Bryant -
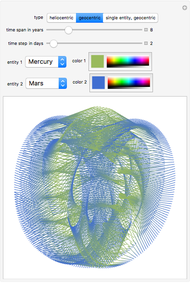 Solar System Mandalas
Solar System Mandalas
Jeff Bryant -
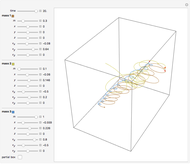 Three-Body Problem in 3D
Three-Body Problem in 3D
Jeff Bryant -
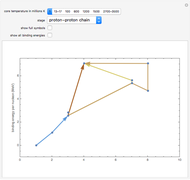 Stellar Nucleosynthesis
Stellar Nucleosynthesis
Jeff Bryant -
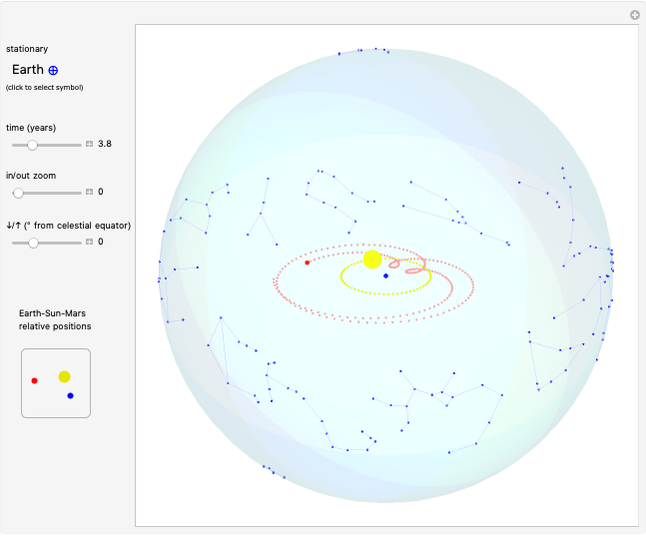 Three World Systems for Earth-Sun-Mars Kinematics
Three World Systems for Earth-Sun-Mars Kinematics
Jeff Bryant -
 Continental Plate Configurations through Time
Continental Plate Configurations through Time
Jeff Bryant -
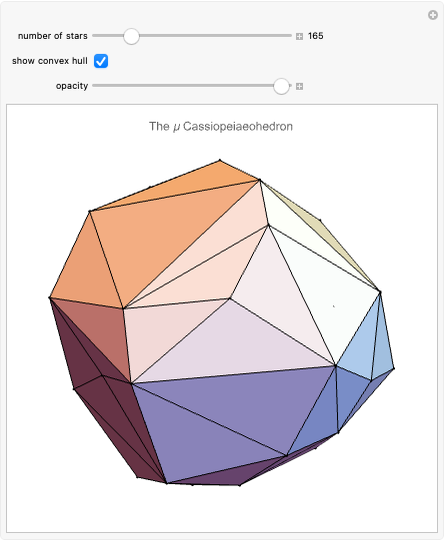 Galactohedra
Galactohedra
Jeff Bryant -
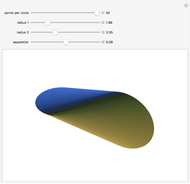 Oloid
Oloid
Jeff Bryant -
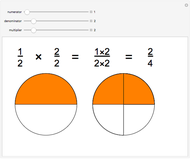 Fundamental Law of Fractions
Fundamental Law of Fractions
Jeff Bryant -
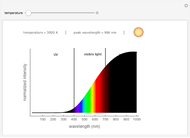 Blackbody Spectrum
Blackbody Spectrum
Jeff Bryant -
 Great Circles on Mercator's Chart
Great Circles on Mercator's Chart
Jeff Bryant -
 Broadcasting Satellite in a Geocentric Kepler Orbit
Broadcasting Satellite in a Geocentric Kepler Orbit
Jeff Bryant -
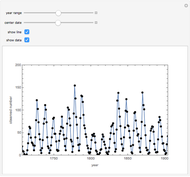 Annual Sunspot Numbers
Annual Sunspot Numbers
Jeff Bryant -
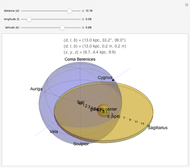 Galactic Coordinate System
Galactic Coordinate System
Jeff Bryant -
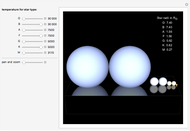 Radius and Temperature of Main Sequence Stars
Radius and Temperature of Main Sequence Stars
Jeff Bryant -
 Deltoidal Hexecontahedron
Deltoidal Hexecontahedron
Jeff Bryant -
 Axial Tilts of Planets
Axial Tilts of Planets
Jeff Bryant -
 Pythagorean Theorem
Pythagorean Theorem
Jeff Bryant