An Efficient Test for a Point to Be in a Convex Polygon

Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
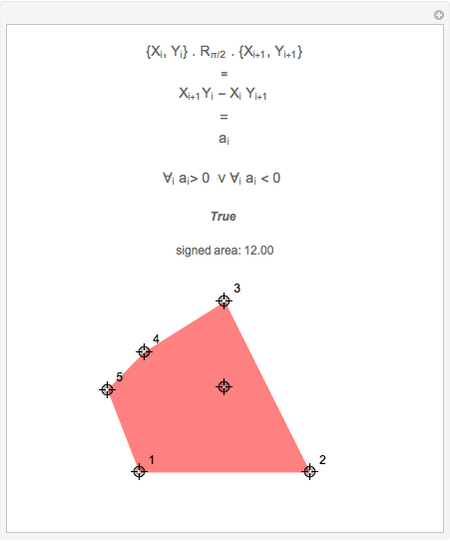
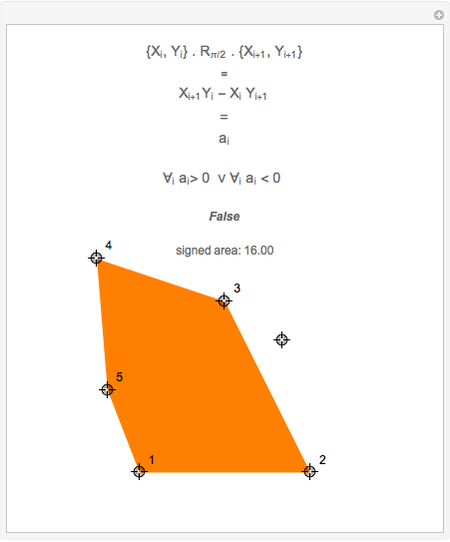
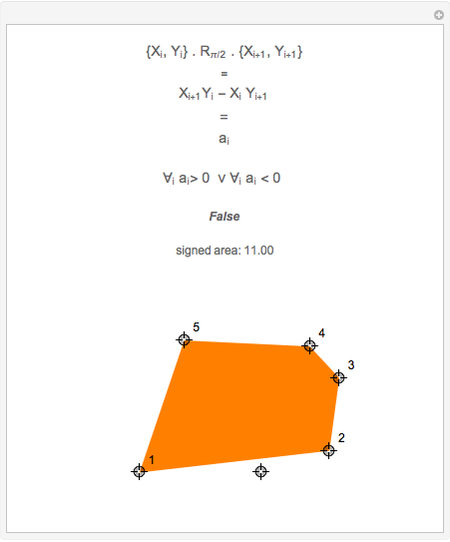
This Demonstration shows an efficient test for checking whether a point is in a convex polygon, indicated by a color change. Note that the test works correctly only for convex polygons.
Contributed by: Robert Nowak (March 2011)
Open content licensed under CC BY-NC-SA
Snapshots



Details
This simple and efficient algorithm determines whether a point  is located inside a convex polygon or not. Suppose the polygon has
is located inside a convex polygon or not. Suppose the polygon has  vertices.
vertices.
First the polygon is translated by  , so that becomes the new origin.
, so that becomes the new origin.
Next the angles of all pairs of adjacent vectors pointing from the origin to the vertices of the polygon are calculated.
If all the angles are in the range  to
to  (when the polygon is defined counterclockwise) or all in to
(when the polygon is defined counterclockwise) or all in to  (in the clockwise case), then the point is inside the convex polygon.
(in the clockwise case), then the point is inside the convex polygon.
The angle calculation can be accomplished as follows:
 ,
,
where  is the rotation matrix through
is the rotation matrix through  .
.
The dot product with reverses the  ,
,  coordinate values and adjusts one of their signs; it is used so that only arctan and the dot product are needed.
coordinate values and adjusts one of their signs; it is used so that only arctan and the dot product are needed.
Fortunately we only need the Boolean information of the sign of the angle, so the necessary calculation simplifies to
 . This further expands to
. This further expands to  .
.
Note:  must be treated mod .
must be treated mod .
Further we can see that  ; this is the area spanned by the two vectors, giving us the total signed area of the polygon:
; this is the area spanned by the two vectors, giving us the total signed area of the polygon:  .
.
So the total costs for the test are just two additions (for the initial origin translation), two multiplications, one subtraction, and one "greater than zero" comparison for every vertex; finally an -fold equality comparison if all the signs of the angles are equal. No floating-point calculations are needed in the case of integer coordinates.
Additionally, the signed area of the polygon is calculated to show that both orientations of polygons are handled correctly.
This Demonstration was developed before fully understanding the Point in Triangle Demonstration. The slight difference is the use of the DotProduct (and perhaps a better documentation/explanation and a more compact implementation) in contrast to the Determinant used in Point in Triangle.
Similar algorithms exist which unnecessarily sum up all the mentioned angles (not only their signs), at the relative high costs of arctan and floating-point operations.
Permanent Citation
 Testing a Polygon for Convexity and Self-Intersection
Testing a Polygon for Convexity and Self-Intersection
Jaime Rangel-Mondragon Fermat-Weber Point of a Polygonal Chain
Fermat-Weber Point of a Polygonal Chain
Bhaswar B. Bhattacharya Point in Triangle
Point in Triangle
Michael John Twardos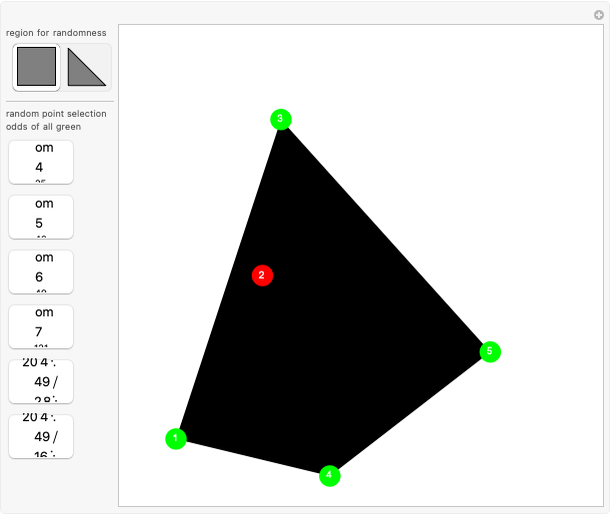 Sylvester's Four-Point Problem
Sylvester's Four-Point Problem
Ed Pegg Jr Self-Intersecting Polygons
Self-Intersecting Polygons
Stephen Wolfram Voronoi Diagrams
Voronoi Diagrams
Ed Pegg Jr and Jeff Bryant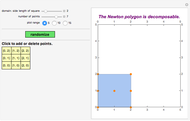 Decomposing a Random Newton Polygon
Decomposing a Random Newton Polygon
Kevin Choi Fate of the Euler Line and the Nine-Point Circle on the Sphere
Fate of the Euler Line and the Nine-Point Circle on the Sphere
Paolo Maraner Chains of Regular Polygons and Polyhedra
Chains of Regular Polygons and Polyhedra
George Beck Ray Tracing for Points in a Polygon
Ray Tracing for Points in a Polygon
Raja Kountanya