Attraction and Repulsion in Dynamical Systems




Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
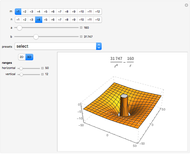
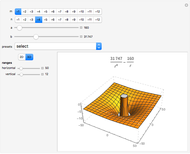
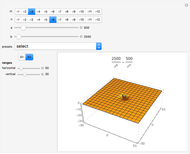
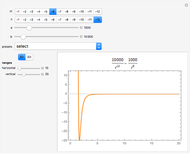
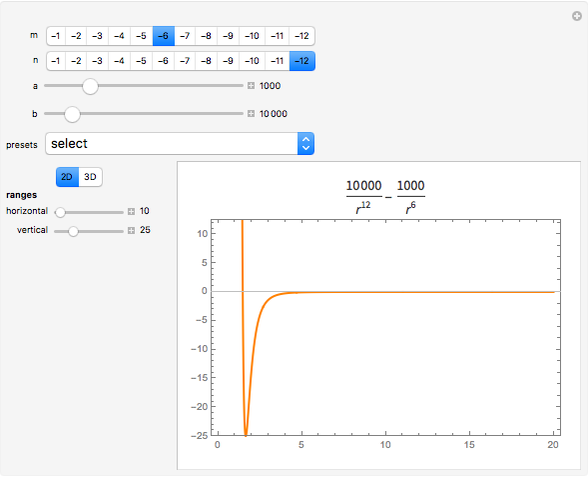
This Demonstration simulates attraction and repulsion in dynamical systems, described by a potential function  , with
, with  being the relevant distance parameter. When applied to
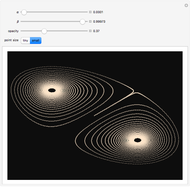
being the relevant distance parameter. When applied to  -body systems, this simple formula can lead to rich and diverse dynamics for different values of
-body systems, this simple formula can lead to rich and diverse dynamics for different values of  ,
,  ,
,  , and
, and  .
.
Contributed by: Stefan Ganev (May 2011)
Open content licensed under CC BY-NC-SA
Snapshots
Details
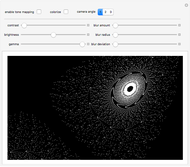
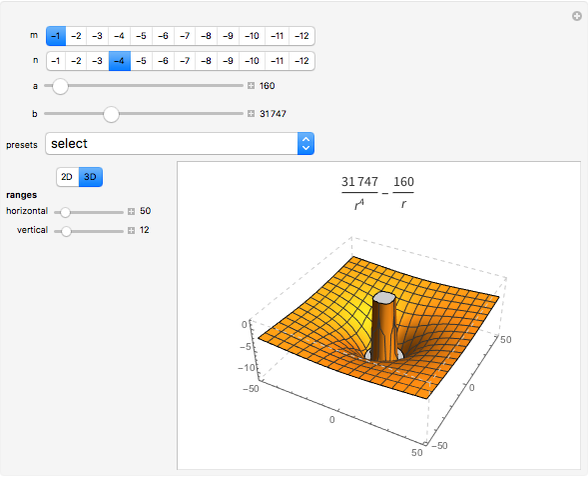
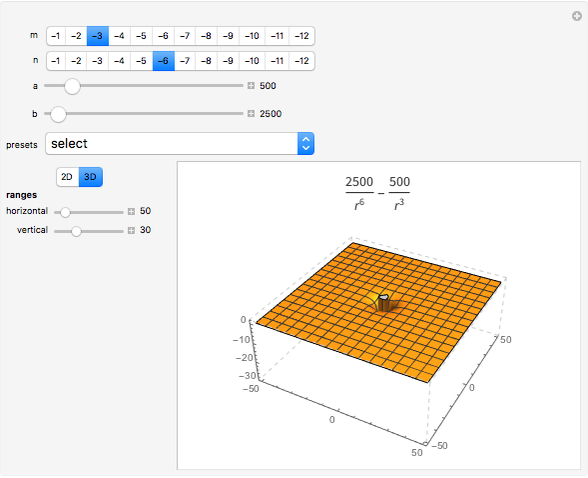
Typically, the attraction term dominates at larger distances, while the repulsion is dominant at smaller distances. For  and
and  this formula refers to the Lennard–Jones 6-12 potential, used in molecular dynamics models. For
this formula refers to the Lennard–Jones 6-12 potential, used in molecular dynamics models. For  it could be viewed as gravitational potential plus an added repulsive component at close distances. In general, this kind of function could be used in simulations related to a variety of problem domains. In [1] such potential functions are applied to model swarming behavior or variations of chase-and-evade algorithms.
it could be viewed as gravitational potential plus an added repulsive component at close distances. In general, this kind of function could be used in simulations related to a variety of problem domains. In [1] such potential functions are applied to model swarming behavior or variations of chase-and-evade algorithms.
Reference
[1] D. M. Bourg and G. Seemann, AI for Game Developers, Sebastopol, CA: O'Reilly Media, 2004 pp. 80–89.
Permanent Citation
 Desynchronization Dynamics of Two Coupled Oscillators
Desynchronization Dynamics of Two Coupled Oscillators
Garrett Neske Bead on a Rotating Wire
Bead on a Rotating Wire
Ryan K. Smith (Wolfram Research) Dynamical Behavior of a Duffing Oscillator
Dynamical Behavior of a Duffing Oscillator
Satya Mohapatra Mass Transfer in Binary Star Systems
Mass Transfer in Binary Star Systems
Jeff Bryant Dynamics of a Falling Chain
Dynamics of a Falling Chain
Erik Mahieu Dynamics of a Double Spring Mass
Dynamics of a Double Spring Mass
Stephen Wilkerson (United States Military Academy West Point) Reactive Collision Dynamics in Two Dimensions
Reactive Collision Dynamics in Two Dimensions
John A. Parkhill and Eric J. Sundstrom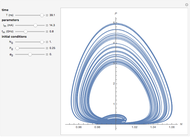 Chaotic Dynamics of a Modulated Semiconductor Laser
Chaotic Dynamics of a Modulated Semiconductor Laser
Manu P. John and V. M. Nandakumaran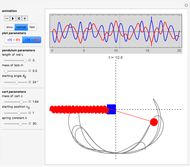 Spring-Cart-Pendulum System
Spring-Cart-Pendulum System
Erik Mahieu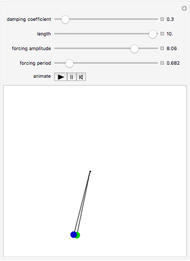 Forced Pendulums with Damping
Forced Pendulums with Damping
Rob Morris