Simplified Models of Terrestrial Arthropod Gaits




Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
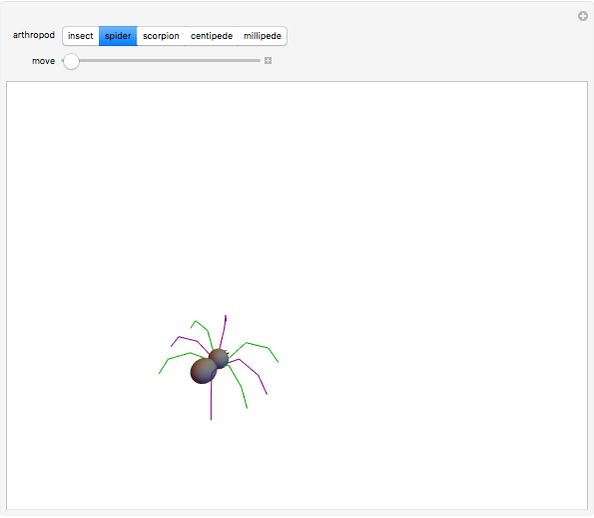
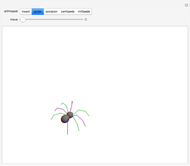
How do bugs walk with all those legs? This Demonstration provides a basic answer to that question for several terrestrial members of the phylum Arthropoda, namely insects, spiders, scorpions, centipedes, and millipedes. Each example is a simplified cartoon showing locomotive movement patterns (or gaits) of a terrestrial arthropod on a solid surface. These models are highly generalized. In reality, not every leg in a set moves at exactly the same time [2, 3]. Furthermore, some of these animals exhibit different or variable gaits with different movement speeds [3, 4, 10] or when burdened with extra weight [11]. Also, not all members of the example taxa behave exactly the same; there is always variation. See Details for a more complete discussion of the generalizations.
Contributed by: Amy Blinder (December 2015)
Open content licensed under CC BY-NC-SA
Snapshots
Details
Locomotive classifications:
Alternate Tripod 6 legs: Insects Subphylum Hexapoda Class Insecta
Insects employ an alternate tripod gait [4]. This means that during movement, they have a set of three legs on the ground while the other set of three legs moves in the air. Each tripod set is comprised of the first and third legs of one side and the second leg of the opposite side. In the model, one tripod set is green and the other is purple.
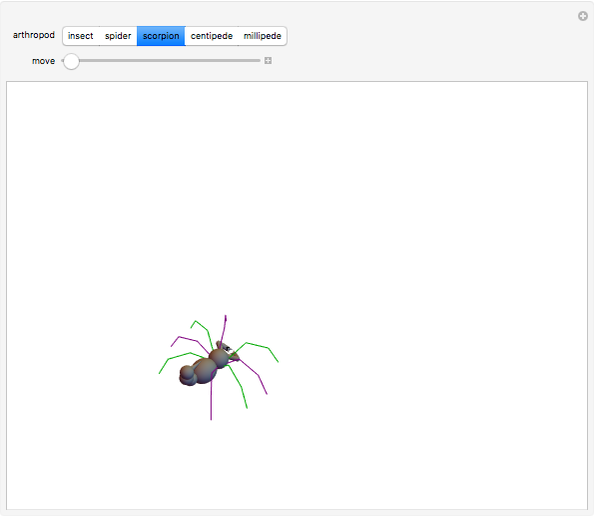
Alternate Tetrapod 8 legs: Spiders and scorpions Subphylum Chelicerata Class Arachnida Orders Araneae (spiders) and Scorpiones (scorpions)
Similar to insects, spiders and scorpions employ an alternate tetrapod gait [1, 3, 8]. While one set of four legs is touching the ground, the other is moving in the air. Each tetrapod set is comprised of the first and third legs of one side and the second and fourth legs of the opposite side. In the model, one tetrapod set is green and the other is purple.
Fun fact: Some arachnid orders employ an alternate tripod gait. For example, harvestmen or daddy longlegs (order Opiliones) hold their second pair of legs in the air when walking while alternating their other three pairs of legs in tripod sets [12]. Camel spiders or wind scorpions (order Solifugae) hold their first pair of legs up when walking while their other three leg pairs alternate tripod sets [13, 14].
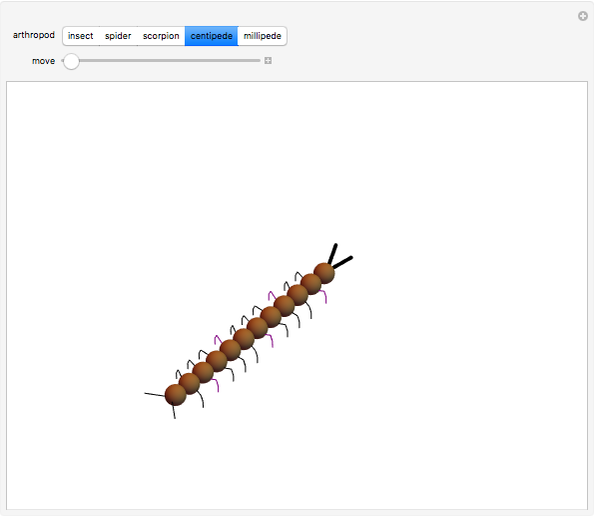
Metachronal Wave I Many legs: Centipedes Subphylum Myriapoda Class Chilopoda
Centipedes have between 30 and 382 legs and one pair of legs per body segment [5, 6]. When walking, their legs move in a metachronal wave pattern. Each leg is moving and slightly out of phase with the next leg. Legs on the opposite side of the body are in opposite phase states. This causes centipedes to look like they are "wiggling" when moving forward. When the centipede moves faster, the phase difference between legs decreases, and the wiggling becomes more extreme [5, 6]. In this model, there are 20 legs that are 1/4 out of phase with one another. The legs shown in purple are in the same phase state.
Metachronal Wave II Even more legs: Millipedes Subphylum Myriapoda Class Diplopoda
Millipedes have up to 750 legs and two pairs of legs per body segment [9]. Like centipedes, their legs move in a metachronal wave pattern when walking. Similarly, the phase difference decreases when moving faster. Unlike centipedes, legs on the opposite side of the body are in the same phase state. This allows them to move forward without the "wiggling" centipedes exhibit [5, 7]. In this model, there are 40 legs that are 1/4 out of phase with one another. The legs in shown in purple are in the same phase state.
There are some very interesting real-world applications of understanding arthropod locomotion. It can, of course, aid in creating more realistic animations [16, 17, 18], but aspects have been applied to robotics as well. Because arthropods can traverse many types of terrain with such efficiency, machines with similar capabilities would have many uses [15].
References
[1] R. Foelix, "Locomotion and Prey Capture," Biology of Spiders, 3rd ed., New York: Oxford University Press, 2010 pp. 188–217.
[2] D. M. Wilson, "Stepping Patterns in Tarantula Spiders," Journal of Experimental Biology, 47, 1967 pp. 133–151.
[3] F. G. Barth, "Locomotion and Leg Reflexes," A Spider’s World: Senses and Behavior, New York: Springer, 2002 pp. 333–350.
[4] M. Klowden, "Locomotor Systems," Physiological Systems in Insects, 3rd ed., Waltham: Academic Press, 2013 pp. 475–528.
[5] R. M. Alexander, "Other Arthropods," The Invertebrates, Cambridge: Cambridge University Press, 1979 pp. 479–484.
[6] J. G. E. Lewis, "External Morphology and Functional Anatomy," The Biology of Centipedes, Cambridge: Cambridge University Press, 1981 pp. 7–46.
[7] S. Case, "General Reactions of a Centipede," Journal of Entomology and Zoology, 11–12, 1919 pp. 79–81.
[8] G. A. Polis, "Neurobiology," The Biology of Scorpions, Redwood City: Stanford University Press, 1990 pp. 341–413.
[9] P. E. Marek, W. A. Shear, and J. E. Bond, "A Redescription of the Leggiest Animal, the Millipede Illacme Plenipes, with Notes on Its Natural History and Biogeography (Dipolpoda, Siphonophorida, Siphonorhiniae)," ZooKeys, 241, 2012 pp. 77–112.
[10] G. M. Hughes, "The Co-ordination of Insect Movements," Journal of Experimental Biology, 29, 1952 pp. 267–285.
[11] J. Dean, "Effect of Load on Leg Movement and Step Coordination of the Stick Insect Carausius Morosus," Journal of Experimental Biology, 159, 1991 pp. 449–471.
[12] R. Pinto-da-Rocha, G. Machado, and G. Giribet, "Morphology and Functional Anatomy," Harvestment: The Biology of Opiliones, Cambridge: Harvard University Press, 2007 pp. 13–61.
[13] F. Punzo, "Functional Anatomy and Physiology," The Biology of Camel-Spiders: Arachnida, Solifugae, New York: Springer 1998 pp. 11–44.
[14] O. Mayorga, V. Yip, N. Mazouchova, D. I. Goldman, and J. C. Spagna, "Running Performance and Gait Kinematics of a Sand-Adapted Arachnid, Galeodes Granti," 2013. Retrieved Dec 1, 2015, from www.sicb.org/meetings/2013/schedule/abstractdetails.php?id=954.
[15] R. Full, "Arthropod Locomotion: Engineering" [Video]. Retrieved Dec 1, 2015, from shapeoflife.org/video/arthropod-locomotion-engineering.
[16] S. Khunthaveelab, "Spider Animation Tutorial," 2011. Retrieved Dec 1, 2015, from www.creativecrash.com/maya/tutorials/animating/c/spider-animations-tutorial.
[17] Making of Centipede Creature Rig [Video]. (2013). Retrieved Dec 1, 2015, from www.youtube.com/watch?v=NTM1XlWyTmA.
[18] G. Maestri, "Animal Motion," Digital Character Animation 3, No. 3, San Francisco: New Riders Press, 2006 pp. 220–241.
Permanent Citation
"Simplified Models of Terrestrial Arthropod Gaits"
http://demonstrations.wolfram.com/SimplifiedModelsOfTerrestrialArthropodGaits/
Wolfram Demonstrations Project
Published: December 2 2015
 Animated Model of an Industrial Robot Arm
Animated Model of an Industrial Robot Arm
Karl Scherer Model of Snake Locomotion by Frictional Forces
Model of Snake Locomotion by Frictional Forces
Christopher Umeki and Gregor Wettermann The Homicidal Chauffeur Problem
The Homicidal Chauffeur Problem
Aaron T. Becker and Javier Garcia Shortest Path for the Dubins Car
Shortest Path for the Dubins Car
Aaron T. Becker and Shiva Shahrokhi Compression Ratio of Spheres in a Curved Tube
Compression Ratio of Spheres in a Curved Tube
Aaron T. Becker, Haoran Zhao and Li Huang Transmitting Force through a Tube Filled with Spheres and Spacers
Transmitting Force through a Tube Filled with Spheres and Spacers
Haoran Zhao and Aaron T. Becker Walking Mechanism Using a Klann Linkage
Walking Mechanism Using a Klann Linkage
Erik Mahieu A Two-Link Inverse-Kinematic Mechanism
A Two-Link Inverse-Kinematic Mechanism
Shutao Tang Chebyshev Walking Machine
Chebyshev Walking Machine
Erik Mahieu Probabilistic Models for Robot Motion
Probabilistic Models for Robot Motion
Aaron T. Becker and Renuka Pakeetharan
-
 Breeding Outcomes with Two Autosomal Linked Genes
Breeding Outcomes with Two Autosomal Linked Genes
Amy Blinder -
 Simplified Models of Terrestrial Arthropod Gaits
Simplified Models of Terrestrial Arthropod Gaits
Amy Blinder -
 Schrödinger's Cat on Catnip
Schrödinger's Cat on Catnip
Amy Blinder -
 Population Genetics: Hardy-Weinberg Equilibrium with Two Loci
Population Genetics: Hardy-Weinberg Equilibrium with Two Loci
Amy Blinder -
 Cross Product in Spherical Coordinates
Cross Product in Spherical Coordinates
Amy Blinder -
 Cross Product of Vectors
Cross Product of Vectors
Amy Blinder