Walking Mechanism Using a Klann Linkage




Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
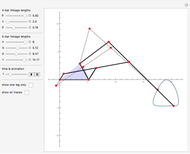
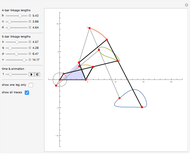
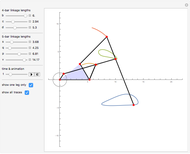
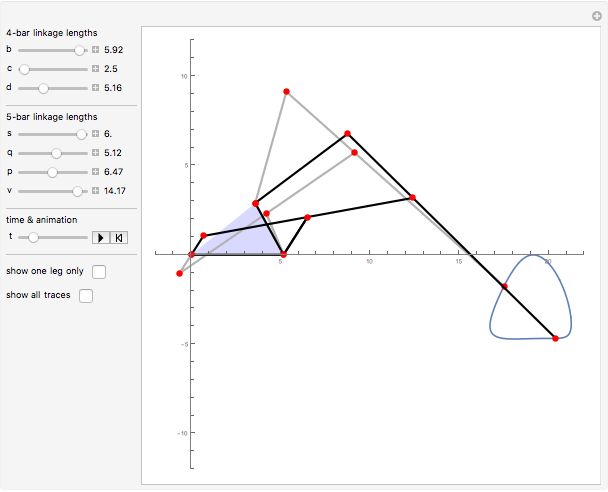
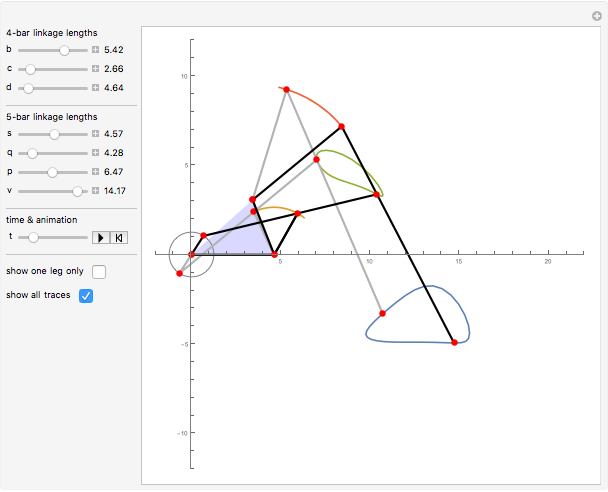
The Klann linkage is a six-bar mechanism that can be used in walking robots that simulate the gait of spiders or crab-like animals. It was patented by Joseph C. Klann in 1998 [1].
[more]
Contributed by: Erik Mahieu (April 2016)
Open content licensed under CC BY-NC-SA
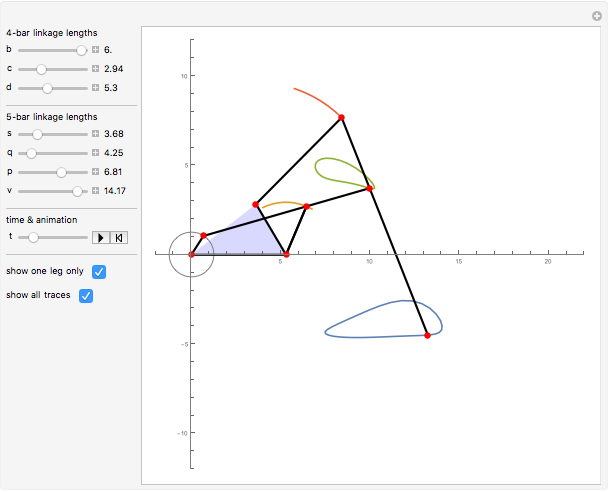
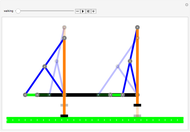
Snapshots
Details
Permanent Citation
"Walking Mechanism Using a Klann Linkage"
http://demonstrations.wolfram.com/WalkingMechanismUsingAKlannLinkage/
Wolfram Demonstrations Project
Published: April 20 2016
 Chebyshev Walking Machine
Chebyshev Walking Machine
Erik Mahieu A Two-Link Inverse-Kinematic Mechanism
A Two-Link Inverse-Kinematic Mechanism
Shutao Tang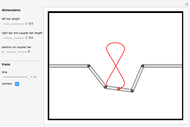 Watt's Lemniscoidal Linkage
Watt's Lemniscoidal Linkage
Erik Mahieu Five-Bar Linkage Model of the Bicycle-Rider System
Five-Bar Linkage Model of the Bicycle-Rider System
Erik Mahieu Coupler Curves of a Four-Bar Linkage
Coupler Curves of a Four-Bar Linkage
Erik Mahieu Car Steering with a Trapezoidal Mechanism
Car Steering with a Trapezoidal Mechanism
Erik Mahieu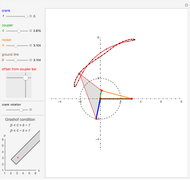 Coupler Curve Atlas for the Four-Bar Linkage
Coupler Curve Atlas for the Four-Bar Linkage
Erik Mahieu Offset Slider-Crank Mechanism
Offset Slider-Crank Mechanism
Erik Mahieu Inverse Kinematics
Inverse Kinematics
Rob Lockhart Forward Kinematics
Forward Kinematics
Rob Lockhart
-
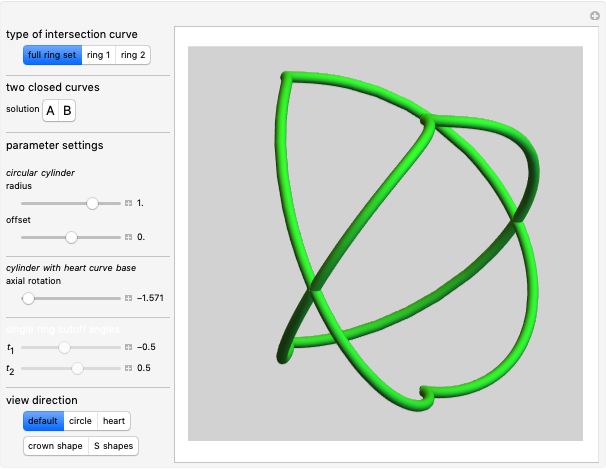 4. Ambiguous Rings Based on a Heart Curve
4. Ambiguous Rings Based on a Heart Curve
Erik Mahieu -
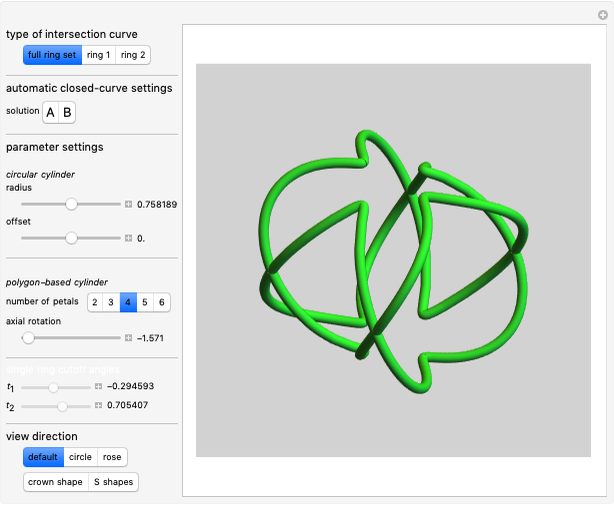 3. Ambiguous Rings Based on a Rose Curve
3. Ambiguous Rings Based on a Rose Curve
Erik Mahieu -
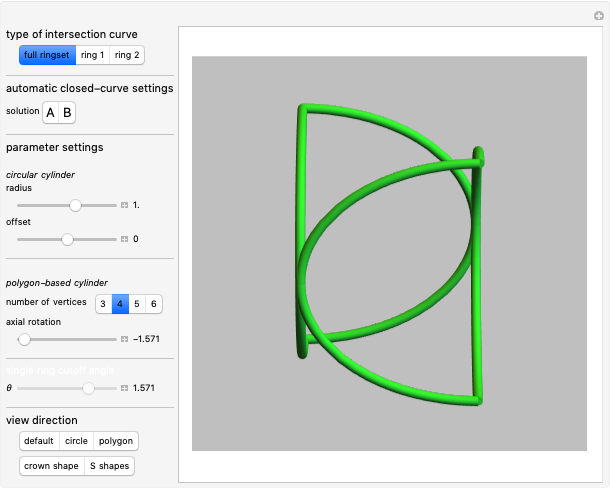 2. Ambiguous Rings Based on a Polygon
2. Ambiguous Rings Based on a Polygon
Erik Mahieu -
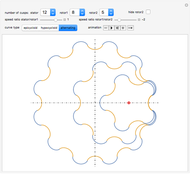
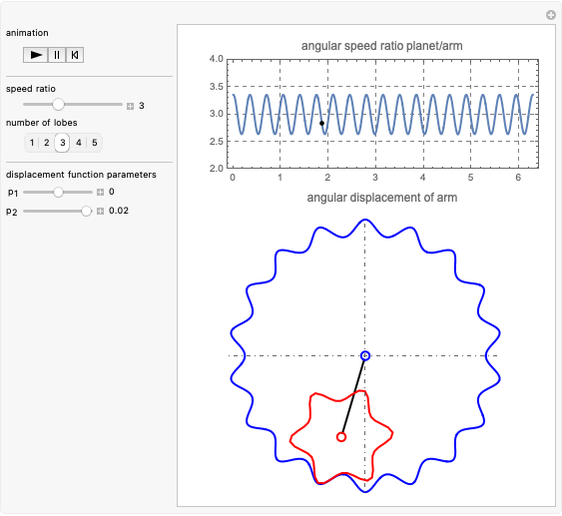 Noncircular Planetary Drive
Noncircular Planetary Drive
Erik Mahieu -
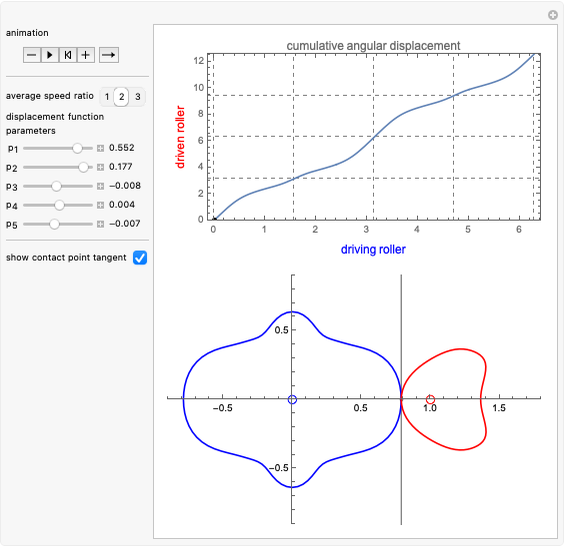 Noncircular Roller Drive
Noncircular Roller Drive
Erik Mahieu -
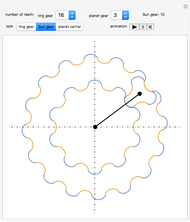 Planetary Gear Train
Planetary Gear Train
Erik Mahieu -
 Rolling Cycloidal Curves
Rolling Cycloidal Curves
Erik Mahieu -
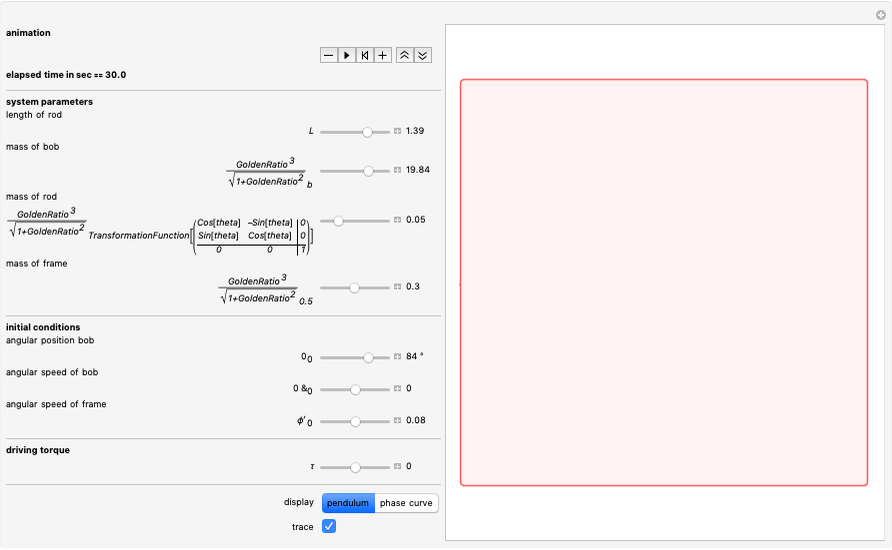 Driven Spherical Pendulum
Driven Spherical Pendulum
Erik Mahieu -
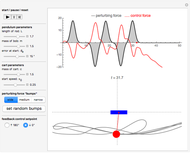 Automatic Feedback Control of a Pendulum-and-Cart System
Automatic Feedback Control of a Pendulum-and-Cart System
Erik Mahieu -
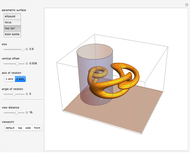
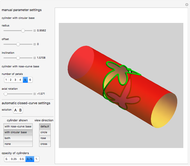 Intersection of a Generalized Cylinder over a Rose Curve with a Circular Cylinder
Intersection of a Generalized Cylinder over a Rose Curve with a Circular Cylinder
Erik Mahieu -
 1. Ambiguous Rings
1. Ambiguous Rings
Erik Mahieu -
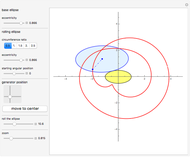 Elliptic Epitrochoid
Elliptic Epitrochoid
Erik Mahieu -
 Intersection of Two Polygonal Cylinders
Intersection of Two Polygonal Cylinders
Erik Mahieu -
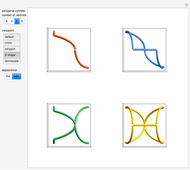
 Designs from Mechanical Linkages
Designs from Mechanical Linkages
Erik Mahieu -
 3D Extrusion Using the Frenet-Serret System
3D Extrusion Using the Frenet-Serret System
Erik Mahieu -
 Daylight Calculator
Daylight Calculator
Erik Mahieu -
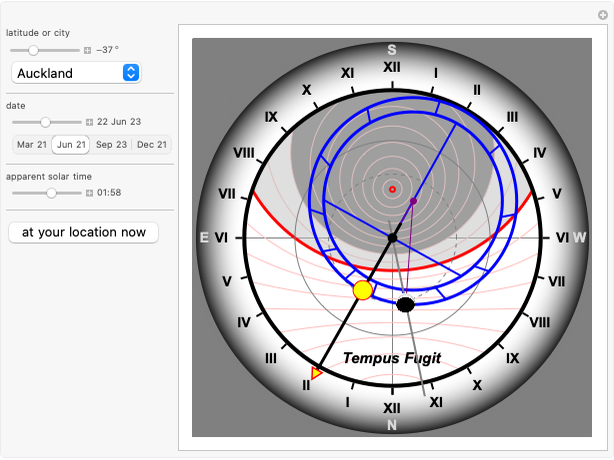 Astronomical Clock
Astronomical Clock
Erik Mahieu -
 Cylindrical Anamorphosis of 3D Polygonal Meshes
Cylindrical Anamorphosis of 3D Polygonal Meshes
Erik Mahieu -
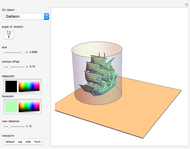
 Cylindrical Anamorphosis of Parametric Surfaces
Cylindrical Anamorphosis of Parametric Surfaces
Erik Mahieu -
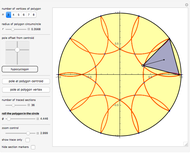 Roulette (Hypotrochogon) of a Polygon Rolling inside a Circle
Roulette (Hypotrochogon) of a Polygon Rolling inside a Circle
Erik Mahieu