A Two-Link Inverse-Kinematic Mechanism
Initializing live version



Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
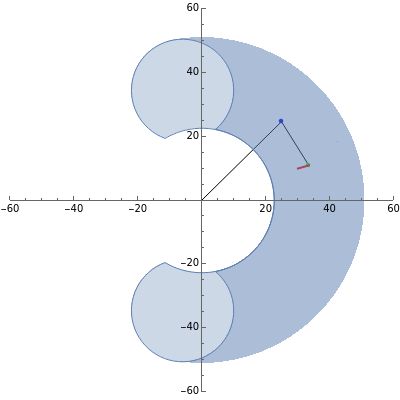
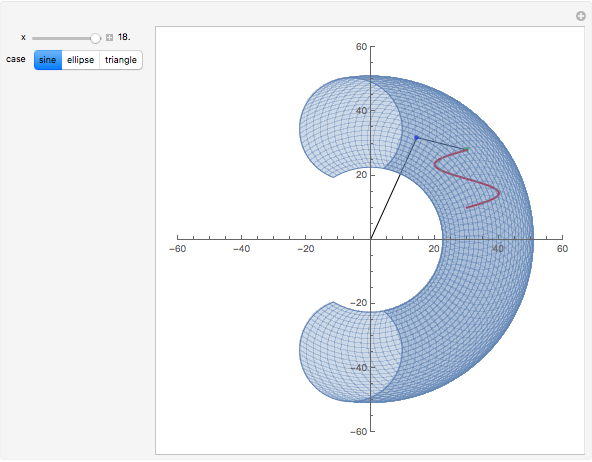
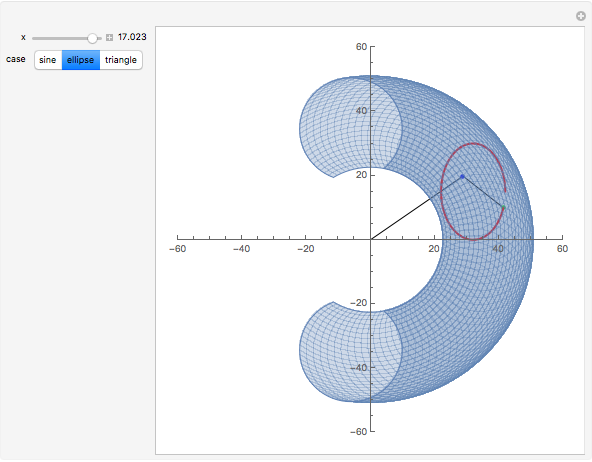
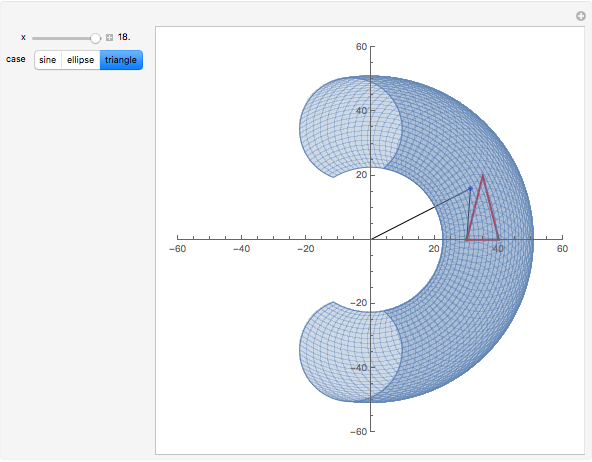
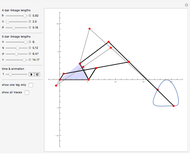
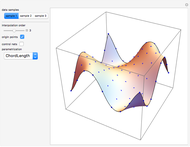
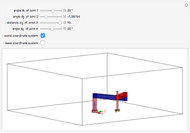
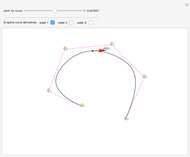
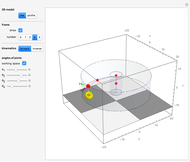
This Demonstration shows a two-linkage inverse-kinematic mechanism. The lengths of the rods shown in the diagram are  and
and  , and their angles of rotation are
, and their angles of rotation are  and
and  , with ranges
, with ranges  to
to  and
and  to
to  , respectively. The coordinates of a point on the toroidal surface are
, respectively. The coordinates of a point on the toroidal surface are





Contributed by: Shutao Tang (June 2014)
(Changzhou University, Jiangsu Province, China)
Open content licensed under CC BY-NC-SA
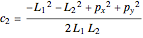
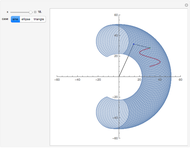
Snapshots
Details
Reference
[1] Wikipedia. "inverse Kinematics." (Jun 12, 2014) en.wikipedia.org/wiki/Inverse_kinematics.
Permanent Citation
Related Demonstrations
More by Author
 Walking Mechanism Using a Klann Linkage
Walking Mechanism Using a Klann Linkage
Erik Mahieu Inverse Kinematics
Inverse Kinematics
Rob Lockhart Forward Kinematics
Forward Kinematics
Rob Lockhart The Homicidal Chauffeur Problem
The Homicidal Chauffeur Problem
Aaron T. Becker and Javier Garcia Chebyshev Walking Machine
Chebyshev Walking Machine
Erik Mahieu Inversive Geometry II: The Peaucellier Inversor Mechanism
Inversive Geometry II: The Peaucellier Inversor Mechanism
Jaime Rangel-Mondragon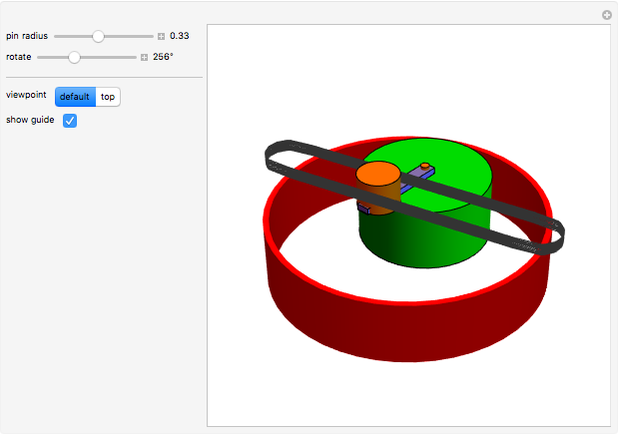 Hypocyclic Mechanism
Hypocyclic Mechanism
Erik Mahieu Antikythera Mechanism
Antikythera Mechanism
Adam P. Goucher Rubik's Cube Mechanism
Rubik's Cube Mechanism
Erik Mahieu Offset Slider-Crank Mechanism
Offset Slider-Crank Mechanism
Erik Mahieu
-
 Algorithm for Cubic Nonuniform B-Spline Curve Interpolation
Algorithm for Cubic Nonuniform B-Spline Curve Interpolation
Shutao Tang -
 Algorithm for Bicubic Nonuniform B-Spline Surface Interpolation
Algorithm for Bicubic Nonuniform B-Spline Surface Interpolation
Shutao Tang -
 Cylindrical Surfaces from NURBS Curves
Cylindrical Surfaces from NURBS Curves
Shutao Tang -
 Constructing a Swung Surface around a B-Spline Curve
Constructing a Swung Surface around a B-Spline Curve
Shutao Tang -
 Global B-Spline Surface Interpolation
Global B-Spline Surface Interpolation
Shutao Tang -
 Global B-Spline Curve Interpolation
Global B-Spline Curve Interpolation
Shutao Tang -
 Global B-Spline Curve Fitting by Least Squares
Global B-Spline Curve Fitting by Least Squares
Shutao Tang -
 A Model of the SCARA Robot
A Model of the SCARA Robot
Shutao Tang -
 The Derivative Vectors of a B-Spline
The Derivative Vectors of a B-Spline
Shutao Tang -
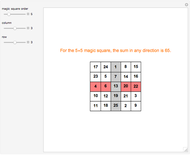 Magic Squares for Odd, Singly Even, and Doubly Even Orders
Magic Squares for Odd, Singly Even, and Doubly Even Orders
Shutao Tang -
 Generating a B-Spline Curve by the Cox-De Boor Algorithm
Generating a B-Spline Curve by the Cox-De Boor Algorithm
Shutao Tang -
 Calculating and Plotting B-Spline Basis Functions
Calculating and Plotting B-Spline Basis Functions
Shutao Tang -
 Generating a Bezier Curve by the de Casteljau Algorithm
Generating a Bezier Curve by the de Casteljau Algorithm
Shutao Tang -
 Forward and Inverse Kinematics of the SCARA Robot
Forward and Inverse Kinematics of the SCARA Robot
Shutao Tang -
 Kinematics of SCARA Robot in 2D
Kinematics of SCARA Robot in 2D
Shutao Tang -
 A Two-Link Inverse-Kinematic Mechanism
A Two-Link Inverse-Kinematic Mechanism
Shutao Tang