Euler Angles




Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
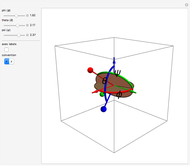
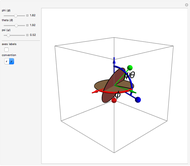
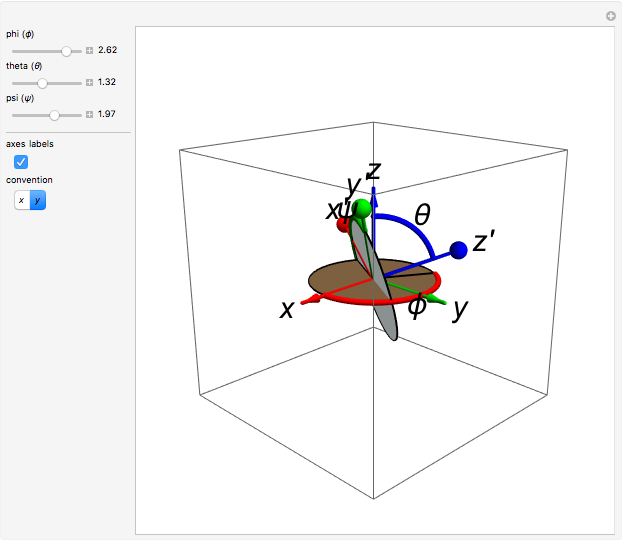
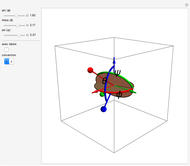
The Euler angles are a classical way to specify the orientation of an object in space with respect to a fixed set of coordinate axes. This Demonstration shows two of the several implementations of the Euler angles  . The initial
. The initial  axes are indicated by the red, green, and blue arrows, while the final
axes are indicated by the red, green, and blue arrows, while the final  axes are indicated by the red, green, and blue spheres.
axes are indicated by the red, green, and blue spheres.
Contributed by: Frederick W. Strauch (August 2011)
Open content licensed under CC BY-NC-SA
Snapshots

Details
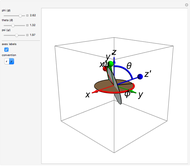
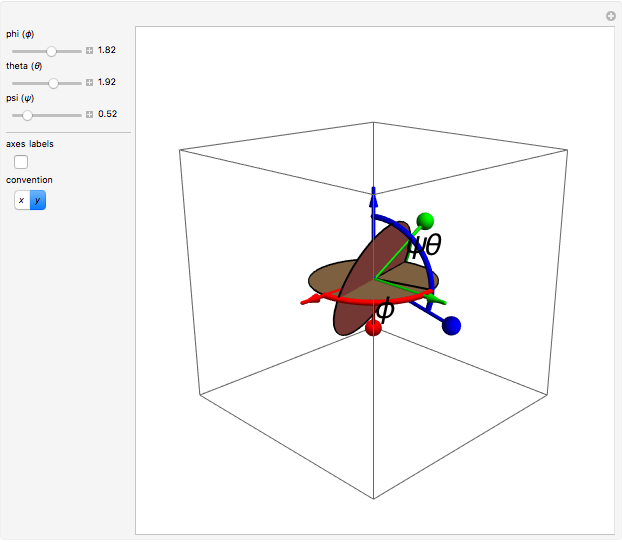
The Euler angles are used to define a sequence of three rotations  , by the angles about the
, by the angles about the  ,
,  , or
, or  , and
, and  axes, respectively. If the second rotation is about the axis, this is called the "
axes, respectively. If the second rotation is about the axis, this is called the " convention". The net transformation is given by the matrix equation
convention". The net transformation is given by the matrix equation
 .
.
This convention is used by Thornton and Marion [1] in Chapter 11.
If the second rotation is about the axis, this is called the " convention". The net transformation is given by the matrix equation
convention". The net transformation is given by the matrix equation
 .
.
This convention is used by J. R. Taylor [2] in Chapter 10.
Both conventions are described by H. Goldstein [3] in Chapter 4.
See also Euler angles.
References
[1] S. T. Thornton and J. B. Marion, Classical Dynamics of Particles and Systems, Belmont, CA: Brooks/Cole, 2004.
[2] J. R. Taylor, Classical Mechanics, Mill Valley, CA: University Science Books, 2005.
[3] H. Goldstein, Classical Mechanics, Reading, MA: Addison-Wesley, 1980.
Permanent Citation
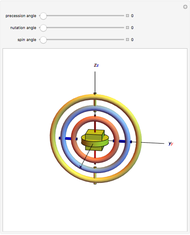 Euler Angles: Precession, Nutation, and Spin
Euler Angles: Precession, Nutation, and Spin
Kevin Hernandez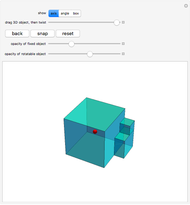 Euler's Rotation Theorem
Euler's Rotation Theorem
Tom Verhoeff (Eindhoven University of Technology)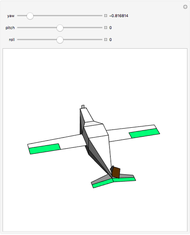 Controlling Airplane Flight
Controlling Airplane Flight
Enrique Zeleny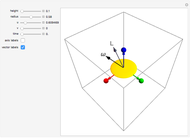 Angular Momentum of a Rotating Rigid Body
Angular Momentum of a Rotating Rigid Body
Frederick W. Strauch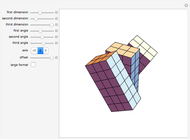 Rectangular Slice Twist
Rectangular Slice Twist
Michael Schreiber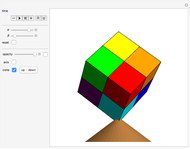 Rotating a Cube in Space
Rotating a Cube in Space
Karl Scherer Iterated Matrix Operations in 3D
Iterated Matrix Operations in 3D
Ed Pegg Jr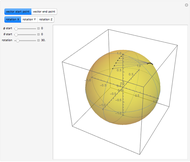 Vector Rotations in 3D
Vector Rotations in 3D
Stephen Wilkerson (Towson University)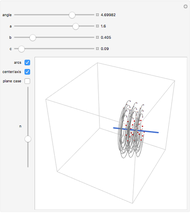 Rotating a Lattice of Points
Rotating a Lattice of Points
George Beck Understanding 3D Rotation
Understanding 3D Rotation
Roger Germundsson
-
 Free Precession of a Rotating Rigid Body
Free Precession of a Rotating Rigid Body
Frederick W. Strauch -
Angular Momentum of a Rotating Rigid Body
Frederick W. Strauch -
 Angular Momentum of a Rotating Particle
Angular Momentum of a Rotating Particle
Frederick W. Strauch -
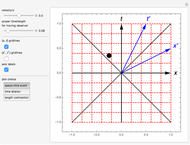 Understanding Special Relativity: The Lorentz Transformation, Time Dilation, and Length Contraction
Understanding Special Relativity: The Lorentz Transformation, Time Dilation, and Length Contraction
Frederick W. Strauch -
 Euler Angles
Euler Angles
Frederick W. Strauch