Free Precession of a Rotating Rigid Body




Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
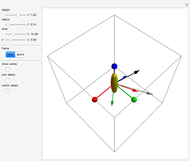
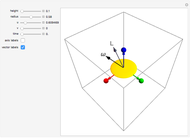
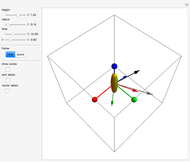
The free precession of a rotating rigid body is a classic application of Euler's equations. Since the precession is free, there is no torque, and the angular momentum is constant in the space frame. In the body frame, however, the body axes  ,
,  ,
,  (indicated by the red, green, and blue spheres) are fixed, and the angular momentum
(indicated by the red, green, and blue spheres) are fixed, and the angular momentum  and space axes
and space axes  (indicated by the red, green, and blue arrows) will change with time. For an axisymmetric ellipsoid, the angular velocity
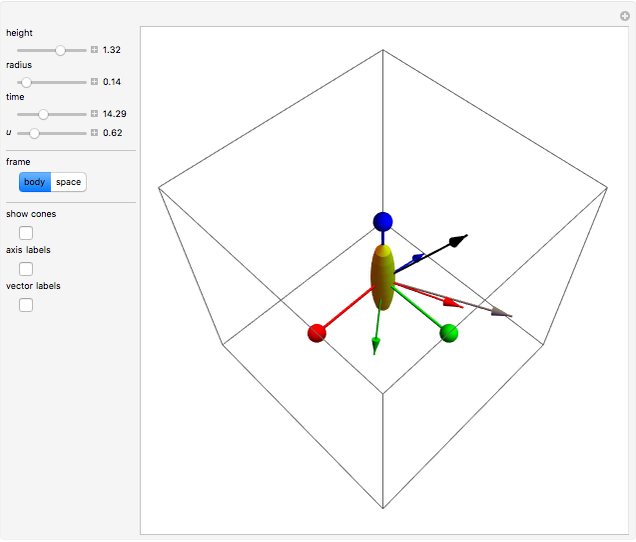
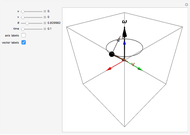
(indicated by the red, green, and blue arrows) will change with time. For an axisymmetric ellipsoid, the angular velocity  and the angular momentum precess about the symmetry axis . This precession can be visualized by the rotation of a space cone (centered about ) around the body cone (centered about ), with the angular velocity at their point of contact. This Demonstration shows the free precession as a function of time in both the body and space frames. The body's height and radius can be varied, as can the initial angular velocity
and the angular momentum precess about the symmetry axis . This precession can be visualized by the rotation of a space cone (centered about ) around the body cone (centered about ), with the angular velocity at their point of contact. This Demonstration shows the free precession as a function of time in both the body and space frames. The body's height and radius can be varied, as can the initial angular velocity  .
.
Contributed by: Frederick W. Strauch (October 2011)
Open content licensed under CC BY-NC-SA
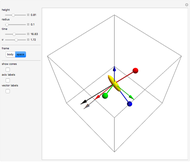
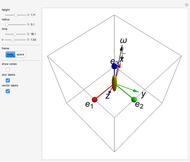
Snapshots


Details
Euler's equations for a rotating rigid body can be exactly solved for the free motion (with zero torque) of an axisymmetric body, with principal moments of inertia  . These give the angular velocity and angular momentum in the body frame, and will exhibit free precession if the angular velocity is not initially along one of the symmetry axes. The body frame and space frame can be related by a product of two rotation matrices. This is used to transform , , and the space and body axes and
. These give the angular velocity and angular momentum in the body frame, and will exhibit free precession if the angular velocity is not initially along one of the symmetry axes. The body frame and space frame can be related by a product of two rotation matrices. This is used to transform , , and the space and body axes and  ), and to visualize their dynamics as a function of time. In the body frame, both and precess about , while in the space frame, and precess about .
), and to visualize their dynamics as a function of time. In the body frame, both and precess about , while in the space frame, and precess about .
The solution to Euler's equations can be found in the following references. For more information, see the Wikipedia entries for "Euler's equations (rigid body dynamics)" and "Precession".
References
[1] J. R. Taylor, "Rotational Motion of Rigid Bodies," Classical Mechanics, Herndon, VA: University Science Books, 2005 pp. 367–416.
[2] S. T. Thornton and J. B. Marion, "Dynamics of Rigid Bodies," Classical Dynamics of Particles and Systems, Pacific Grove, CA: Brooks/Cole, 2004 pp. 411–467.
Permanent Citation
 Angular Momentum of a Rotating Rigid Body
Angular Momentum of a Rotating Rigid Body
Frederick W. Strauch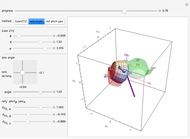 Three Parametrizations of Rotations
Three Parametrizations of Rotations
Aaron T. Becker and Benedict Isichei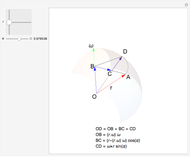 Formula for 3D Rotation
Formula for 3D Rotation
Izidor Hafner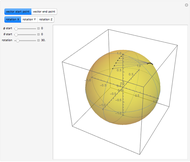 Vector Rotations in 3D
Vector Rotations in 3D
Stephen Wilkerson (Towson University)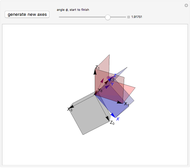 Using Eigenvalue Analysis to Rotate in 3D
Using Eigenvalue Analysis to Rotate in 3D
Raja Kountanya Rotation and Translation of a Rigid Body
Rotation and Translation of a Rigid Body
Enrique Zeleny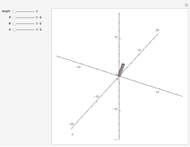 Rotating Laser Sword in 3D
Rotating Laser Sword in 3D
Marvin Jones Rotating a Unit Vector in 3D Using Quaternions
Rotating a Unit Vector in 3D Using Quaternions
Gerard Balmens Combining Two 3D Rotations
Combining Two 3D Rotations
George Beck and Jeff Bryant Iterated Matrix Operations in 3D
Iterated Matrix Operations in 3D
Ed Pegg Jr
-
 Free Precession of a Rotating Rigid Body
Free Precession of a Rotating Rigid Body
Frederick W. Strauch -
Angular Momentum of a Rotating Rigid Body
Frederick W. Strauch -
 Angular Momentum of a Rotating Particle
Angular Momentum of a Rotating Particle
Frederick W. Strauch -
 Understanding Special Relativity: The Lorentz Transformation, Time Dilation, and Length Contraction
Understanding Special Relativity: The Lorentz Transformation, Time Dilation, and Length Contraction
Frederick W. Strauch -
 Euler Angles
Euler Angles
Frederick W. Strauch