Inverse Kinematics in Redundant Robot Manipulator




Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
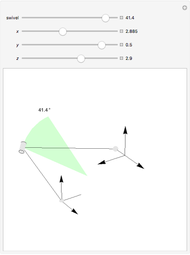
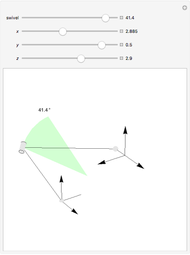
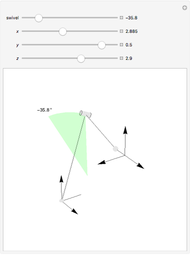
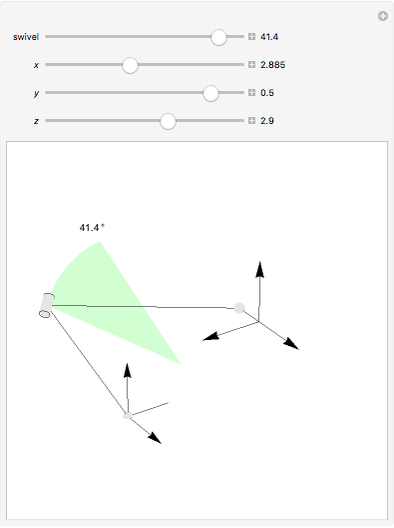
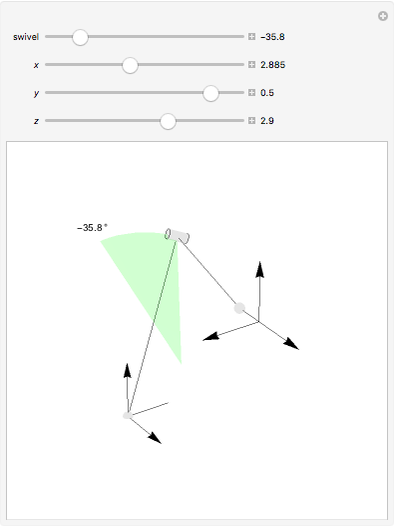
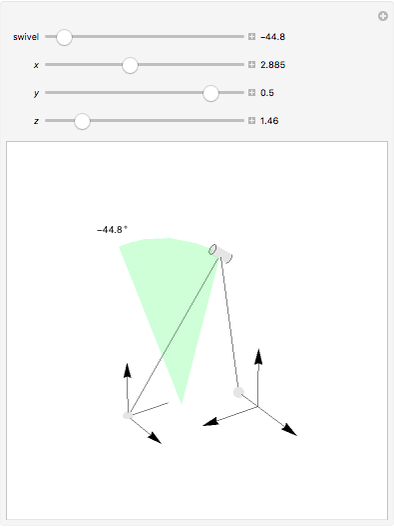
This Demonstration shows the resolution of the inverse kinematics problem of a robot manipulator with seven degrees of freedom through the use of a swivel angle. Controls can vary the three-dimensional location of the robot arm and its swivel angle.
Contributed by: André Carvalho (June 2015)
Open content licensed under CC BY-NC-SA
Snapshots

Details
Reference
[1] Y. Wang and P. Artemiadis, "Closed-Form Inverse Kinematic Solution for Anthropomorphic Motion in Redundant Robot Arms," Advances in Robotics & Automation, 2(3), 2013. doi:10.4172/2168-9695.1000110.
Permanent Citation
"Inverse Kinematics in Redundant Robot Manipulator"
http://demonstrations.wolfram.com/InverseKinematicsInRedundantRobotManipulator/
Wolfram Demonstrations Project
Published: June 10 2015
 Inverse Kinematics
Inverse Kinematics
Rob Lockhart Kinematics of a Redundant Anthropomorphic Arm with Seven Degrees of Freedom
Kinematics of a Redundant Anthropomorphic Arm with Seven Degrees of Freedom
Frederick Wu Forward Kinematics of Humanoid Robots
Forward Kinematics of Humanoid Robots
Frederick Wu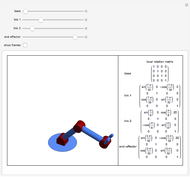 Forward Kinematics
Forward Kinematics
Rob Lockhart Common Robot Arm Configurations
Common Robot Arm Configurations
Mohammad Sultan and Aaron T. Becker Robot Builder
Robot Builder
Frank Liao Snake-Arm Robot
Snake-Arm Robot
Sándor Kabai Fractal Robot Arm
Fractal Robot Arm
Sándor Kabai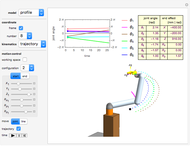 Joint Space and Tooling Space for Robot Motion Control
Joint Space and Tooling Space for Robot Motion Control
Frederick Wu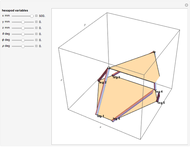 Motions of a Hexapod Robot
Motions of a Hexapod Robot
Jim Fowler