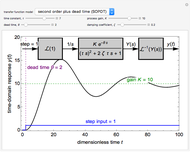
Zero-Pole Cancellation in Transfer Functions
Initializing live version



Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
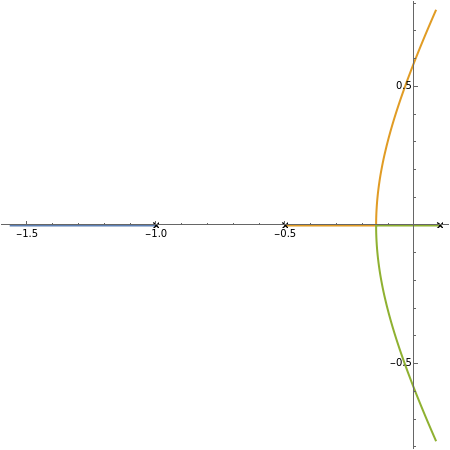
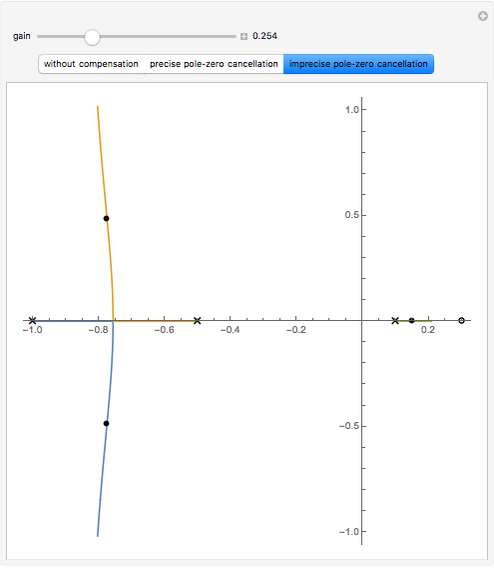
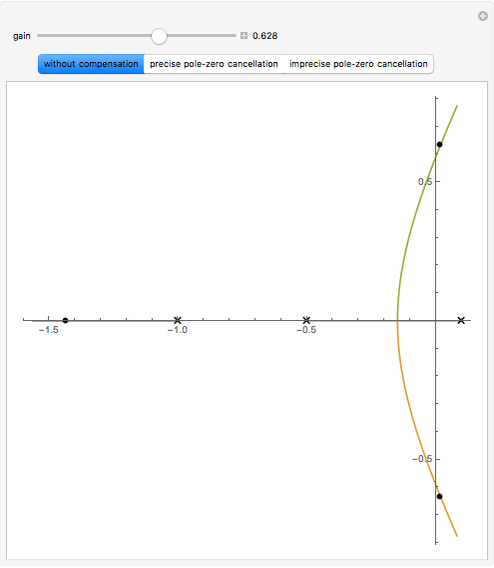
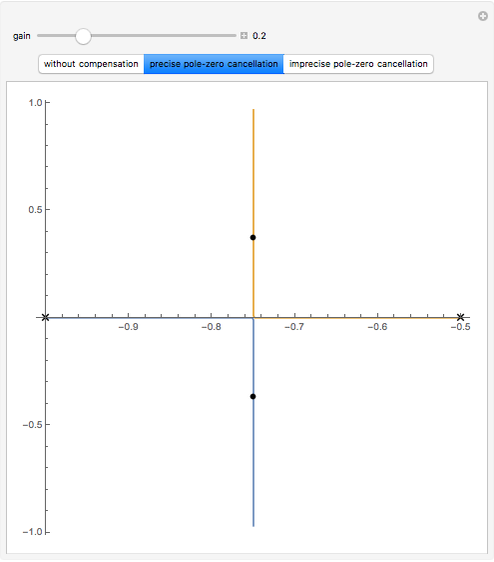
When the transfer function of a system has poles in the right half-plane of the complex numbers, the system is unstable. While it is theoretically possible to design a proportional-derivative (PD) compensator to cancel the poles, in practice is it is difficult to create perfect pole-zero cancellation due to imprecision in the model.
[more]
Contributed by: Hugo Tadashi (March 2011)
Open content licensed under CC BY-NC-SA
Details
Snapshots



Permanent Citation
Related Demonstrations
More by Author
 First- and Second-Order Transfer Functions
First- and Second-Order Transfer Functions
Rachael L. Baumann and Adam J. Johnston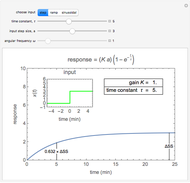 First-Order Transfer Functions in Process Control
First-Order Transfer Functions in Process Control
Simon M. Lane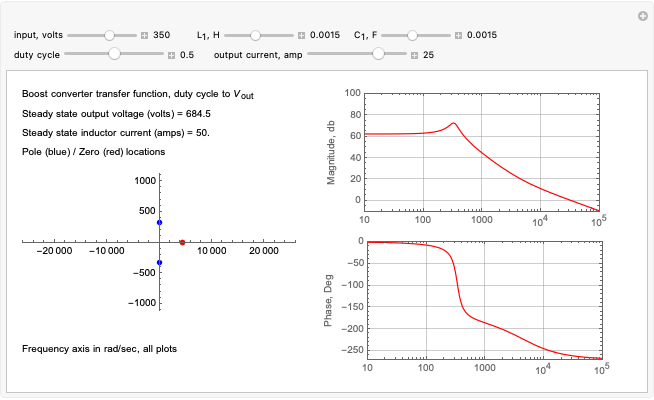 Transfer Function for Continuous-Mode Boost Converter
Transfer Function for Continuous-Mode Boost Converter
Gary Baker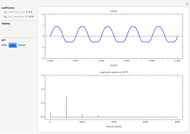 Harmonic Distortion of Nonlinear Transfer Function
Harmonic Distortion of Nonlinear Transfer Function
Carsten Roppel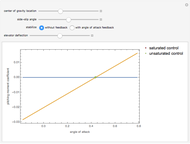 Static Longitudinal Stability of Fixed Wing Aircraft
Static Longitudinal Stability of Fixed Wing Aircraft
Suba Thomas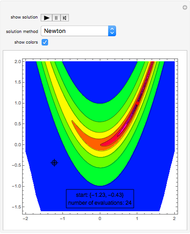 Minimizing the Rosenbrock Function
Minimizing the Rosenbrock Function
Michael Croucher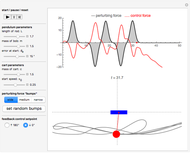 Automatic Feedback Control of a Pendulum-and-Cart System
Automatic Feedback Control of a Pendulum-and-Cart System
Erik Mahieu Proportional Temperature Control
Proportional Temperature Control
Jeff Bryant Inverted Pendulum Controls
Inverted Pendulum Controls
Stephen Wilkerson (Towson University) and Nathan Slegers (University of Alabama, Huntsville) with contributions by Franz Brandhuber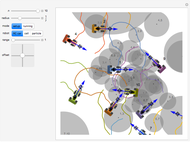 Steering Multiple Radio Control (RC) Cars with One Joystick
Steering Multiple Radio Control (RC) Cars with One Joystick
Aaron T. Becker and Javier Garcia