Bicycle Rides



Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
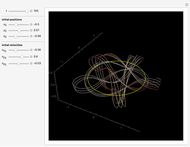
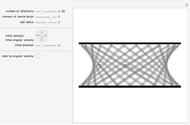
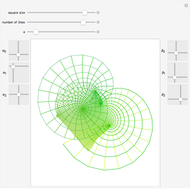
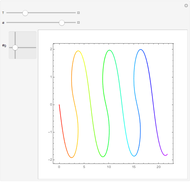
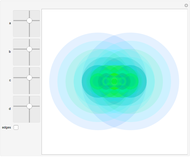
Hundreds of millions of people ride bicycles every day. Yet only a small fraction are aware of the multitude of beautiful mathematics and physics involved. Describing a bicycle ride requires the mechanics of nonholonomic multi‐body systems, control theory, and algebraic geometry.
[more]
Contributed by: Michael Trott with permission of Springer (March 2011)
From: The Mathematica GuideBook for Numerics, second edition by Michael Trott (© Springer, 2008).
Open content licensed under CC BY-NC-SA
Snapshots



Details
For modeling bicycle rides in general, see:
D. J. N. Limebeer and R. S. Sharp, "Bicycles, Motorcycles and Models," IEEE Control Systems Magazine, 26(5), 2006 pp.34–61.
S. R. Dunbar, R. J. C. Bosman and S. E. M. Nooij, "The Track of a Bicycle Back Tire," Mathematics Magazine, 74(4), 2001 pp.273–287.
M. Levi and S. Tabachnikov. "On Bicycle Tire Tracks Geometry, Hatchet Planimeter, Menzin's Conjecture and Oscillation of Unicycle Tracks." (Feb 3, 2008) http://arxiv.org/pdf/0801.4396.
Permanent Citation
 Flight of a Glider
Flight of a Glider
Helmut Knaust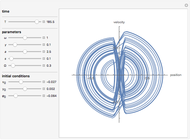 Phase Space of an Intermittently Driven Oscillator
Phase Space of an Intermittently Driven Oscillator
Manu P. John and V. M. Nandakumaran Galton Board
Galton Board
Michael Trott with permission of Springer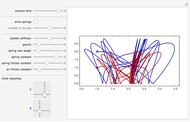 Bouncing Mass-Spring System
Bouncing Mass-Spring System
Michael Trott with permission of Springer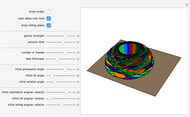 Rolling Disk
Rolling Disk
Michael Trott with permission of Springer Time Evolution of a Four-Spring Three-Mass System
Time Evolution of a Four-Spring Three-Mass System
Michael Trott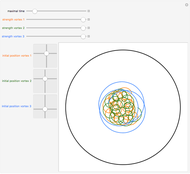 Interacting Vortices in a Disk
Interacting Vortices in a Disk
Michael Trott Pen Falling Off a Finger
Pen Falling Off a Finger
Michael Trott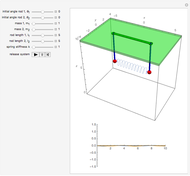 Coupled Pendulum Oscillations
Coupled Pendulum Oscillations
Stephen Wilkerson (Towson University)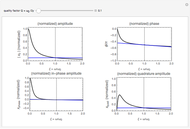 Resonance Lineshapes of a Driven Damped Harmonic Oscillator
Resonance Lineshapes of a Driven Damped Harmonic Oscillator
Antoine Weis (University of Fribourg)
-
 Planar Three-Body Problem in Phase Space
Planar Three-Body Problem in Phase Space
Michael Trott -
 Planar Three-Body Problem
Planar Three-Body Problem
Michael Trott -
 Band Spectrum in a Periodic Potential
Band Spectrum in a Periodic Potential
Michael Trott -
 The Euclidean Algorithm and Simple Continued Fractions
The Euclidean Algorithm and Simple Continued Fractions
Michael Trott -
 Secant Root Finding Method
Secant Root Finding Method
Michael Trott -
 Particle in an Infinite Circular Well
Particle in an Infinite Circular Well
Michael Trott -
 The Powers Of Presidents and Prime Ministers
The Powers Of Presidents and Prime Ministers
Michael Trott -
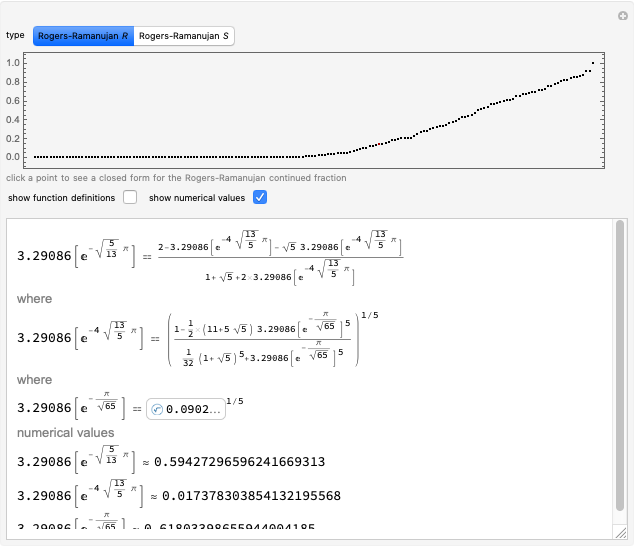 Ramanujan R and S
Ramanujan R and S
Michael Trott -
 Jack Lew Signature Function
Jack Lew Signature Function
Michael Trott -
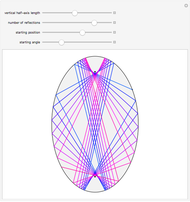 Reflections in an Elliptical Region
Reflections in an Elliptical Region
Michael Trott -
 Orbit of a Test Charge in the Field of a Charged Ring
Orbit of a Test Charge in the Field of a Charged Ring
Michael Trott -
 Mean Value Theorem
Mean Value Theorem
Michael Trott -
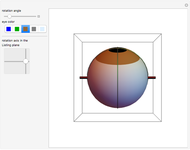 Listing's Law
Listing's Law
Michael Trott -
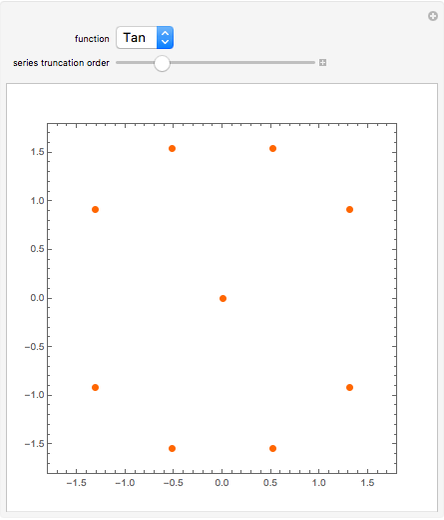 Zeros of Truncated Series of Elementary Functions
Zeros of Truncated Series of Elementary Functions
Michael Trott -
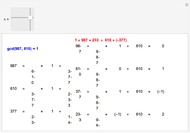 Extended Euclidean Algorithm
Extended Euclidean Algorithm
Michael Trott -
 Multiple Reflections of a Superball
Multiple Reflections of a Superball
Michael Trott -
 Conformal Maps
Conformal Maps
Michael Trott -
 Complex Pendulum Oscillations at Complex Times
Complex Pendulum Oscillations at Complex Times
Michael Trott -
 Commute p to the Left
Commute p to the Left
Michael Trott -
 Circle Reflections
Circle Reflections
Michael Trott