Cooperation in Heterogeneous Populations



Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
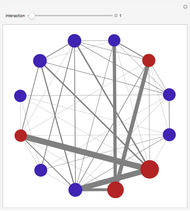
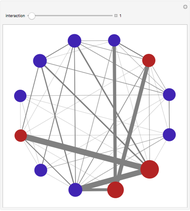
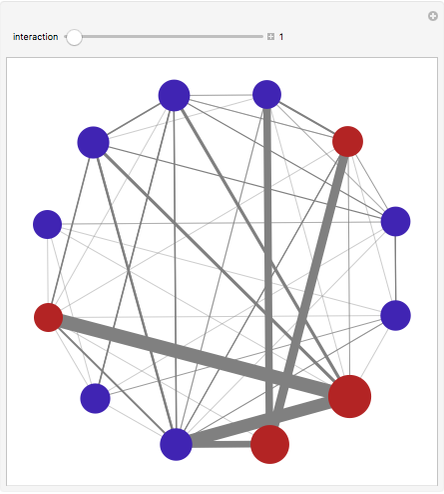
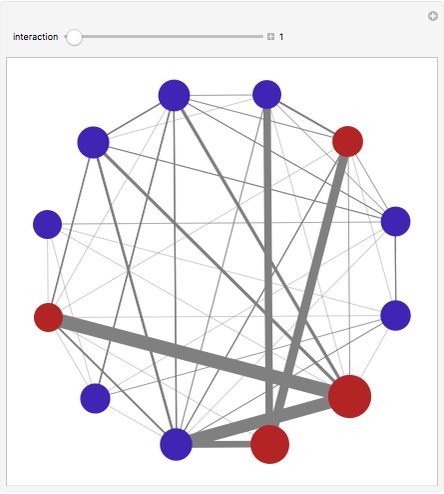
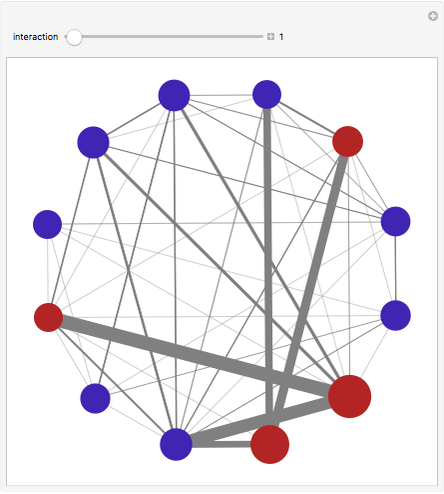
This is a study of the evolution of cooperation in a small, heterogeneous population. Individuals can either be of type COOP (cooperator, depicted as blue vertices) or DEF (defector, depicted as red vertices). When two cooperating individuals interact, each individual gains a benefit  from the mutual cooperative act but also has to pay some costs
from the mutual cooperative act but also has to pay some costs  . If a cooperator interacts with a defector the cooperator has to pay the costs
. If a cooperator interacts with a defector the cooperator has to pay the costs  but the defector gets the benefit
but the defector gets the benefit  without paying any costs. If two defectors meet they get nothing but they also have no costs. (Reciprocal grooming in primates is a useful example for such a cooperative act: the time invested in grooming is the cost of the behavior and the benefit is increased health due to the decreased parasite load.) Individuals interact at different frequencies as indicated by the thicknesses of the connecting edges: a thicker line indicates that individuals are more likely to interact. Individuals update their strategy by copying the strategy of their neighbors with a probability proportional to the fitness of the strategies in their neighborhood. Individual fitness is determined by the payoffs that they receive from their interactions and is indicated by the size of the disks. This Demonstration starts with a random number of initial cooperators and a cost:benefit ratio of 1:40.
without paying any costs. If two defectors meet they get nothing but they also have no costs. (Reciprocal grooming in primates is a useful example for such a cooperative act: the time invested in grooming is the cost of the behavior and the benefit is increased health due to the decreased parasite load.) Individuals interact at different frequencies as indicated by the thicknesses of the connecting edges: a thicker line indicates that individuals are more likely to interact. Individuals update their strategy by copying the strategy of their neighbors with a probability proportional to the fitness of the strategies in their neighborhood. Individual fitness is determined by the payoffs that they receive from their interactions and is indicated by the size of the disks. This Demonstration starts with a random number of initial cooperators and a cost:benefit ratio of 1:40.
Contributed by: Bernhard Voelkl (March 2011)
Open content licensed under CC BY-NC-SA
Snapshots


Details
Based on data published in T. Nishida and K. Hosaka, "Coalition Strategies among Adult Male Chimpanzees of the Mahale Mountains, Tanzania," Great Ape Societies (W. C. McGrew, L. F. Marchant, and T. Nishida, eds.), Cambridge: Cambridge University Press, 1996 pp. 114–134.
Permanent Citation
"Cooperation in Heterogeneous Populations"
http://demonstrations.wolfram.com/CooperationInHeterogeneousPopulations/
Wolfram Demonstrations Project
Published: March 7 2011
 The Moran Process
The Moran Process
Bernhard Voelkl Ant Colony Optimization (ACO)
Ant Colony Optimization (ACO)
Rasmus Kamper Fitness Model for Gene Frequency in Populations
Fitness Model for Gene Frequency in Populations
Bruce Torrence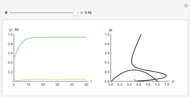 Bifurcation in a Model of Spruce Budworm Populations
Bifurcation in a Model of Spruce Budworm Populations
Selwyn Hollis Graphs of Random Permutations
Graphs of Random Permutations
Stephen Wolfram Permutations, k-Permutations and Combinations
Permutations, k-Permutations and Combinations
George Beck Eulerian Numbers versus Stirling Numbers of the First Kind
Eulerian Numbers versus Stirling Numbers of the First Kind
George Beck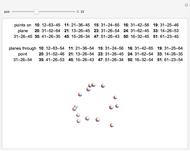 The Klein Configuration
The Klein Configuration
Ed Pegg Jr Consecutive Smooth Numbers
Consecutive Smooth Numbers
Ed Pegg Jr Set Partitions Match Restricted Growth Functions
Set Partitions Match Restricted Growth Functions
George Beck