Country Interior: Two Solutions to the Nonconvex Polygon Interior Problem


Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
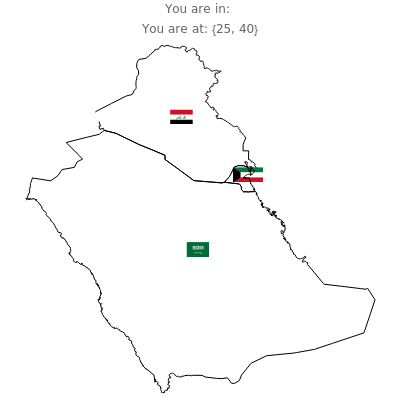
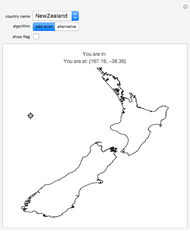
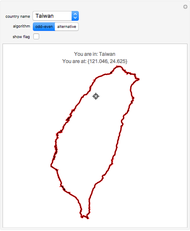
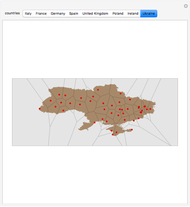
The problem to be solved here is a polygon-interior problem, which is to determine whether or not a point is inside a polygon. We assume the polygon is not self intersecting, though it may be nonconvex.
[more]
Contributed by: Te-yuan Chyou (March 2011)
Open content licensed under CC BY-NC-SA
Snapshots




Details
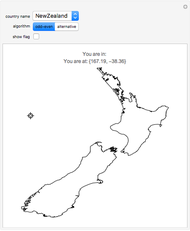
I worked with a friend on an university project to do with mobile-phone application development, for which we wanted an algorithm to determine the country that had given GPS coordinates. Here we describe our algorithm one step at a time and explain how it works.
1. We need a non-self-intersecting polygon with vertices  ,
,  , indexed to go around the polygon in either direction.
, indexed to go around the polygon in either direction.
2. Regroup the vertices as  .
.
3. For each pair of vertices  , define a linear function
, define a linear function  that passes through both vertices:
that passes through both vertices:
 .
.
4. For each pair of vertices , compute the midpoint  and
and  .
.
The gradient vectors in this case are constant vectors, either all pointing to the interior of the polygon or all pointing to the exterior, depending on whether the polygon vertices were indexed counterclockwise or clockwise. This makes sense because we can treat a polygon as a discretized, closed contour curve of a function  , and a closed contour implies the presence of a local maximum or minimum. From experience, the vectors all point into the interior if the vertices are indexed counterclockwise.
, and a closed contour implies the presence of a local maximum or minimum. From experience, the vectors all point into the interior if the vertices are indexed counterclockwise.
5. Find the bounding box of the polygon, a rectangular region identified by the highest, lowest, left-most, and right-most coordinates. Given coordinates  to test, if
to test, if  is outside the bounding box then is outside the polygon. If is inside the bounding box, go to Step 6. (This step can alternatively be done right at the beginning.)
is outside the bounding box then is outside the polygon. If is inside the bounding box, go to Step 6. (This step can alternatively be done right at the beginning.)
6. Compute the discriminants  for each pair of vertices.
for each pair of vertices.
7. Find the edge closest to ; if the edge closest to is the one defined by  , then the distance between
, then the distance between  and will be the minimum. Find
and will be the minimum. Find  .
.
8a. Now suppose that all are pointing to the interior (counterclockwise-defined polygon): then is inside if  ; otherwise it is outside.
; otherwise it is outside.
8b. If on the other hand all are pointing to the exterior (for the clockwise orientation), then is inside if  ; otherwise it is outside.
; otherwise it is outside.
Because the polygon can be nonconvex, a ray drawn from a point may cross more than one edge, but only the edge encountered first is relevant. Finding the edge closest to a point ensures that we are dealing with such an edge.
We can tell from the part of the boundary closest to the test point whether it is inside or outside because we know the are either all pointing to the interior of the polygon or all pointing to the exterior.
8c. Finally, it may happen that  . In that case, perturb by a very small amount in a random direction and go back to Step 7.
. In that case, perturb by a very small amount in a random direction and go back to Step 7.
If the point is well inside or well outside the polygon, the result will be consistent no matter how we perturb . The result will be inconsistent if is close to the edge. Since we only perturb by a very small amount, we can infer that is "on the edge", for which we may still decide that is in the interior.
Alternative approach:
From Step 4 and onwards, instead of calculating  , , and
, , and  and computing the closest edge, we draw a ray from the testing coordinate and count the number of edges intersected by the ray. If the ray intersects the polygon an even number of times (including zero) then the testing coordinate is outside the polygon; otherwise it is inside. This method is also known as the odd-even rule. In both cases the problem to be solved here is how to deal with the nonconvex part of the polygon.
and computing the closest edge, we draw a ray from the testing coordinate and count the number of edges intersected by the ray. If the ray intersects the polygon an even number of times (including zero) then the testing coordinate is outside the polygon; otherwise it is inside. This method is also known as the odd-even rule. In both cases the problem to be solved here is how to deal with the nonconvex part of the polygon.
Our goal is an algorithm that is able to handle the scenario where a country is inside a bigger country, for example Lesotho and South Africa. Suppose that the GPS location is in Lesotho: we want an algorithm to make an unambiguous decision. In this case one solution would be to find the distances between the current point and the closest edge for each polygon, and then take the polygon (country) that gives the minimum. This is why we initially came up with the alternative algorithm that involves finding the closest polygon edge and its geometric properties. However, the odd-even rule is much easier to implement and less computationally intensive, although in practice we still need to deal with the special cases in which the testing coordinate coincides with one of the vertices or the edge separately.
Permanent Citation
 Voronoi Diagrams for European Cities
Voronoi Diagrams for European Cities
Trey Taylor New York City Subway Stations
New York City Subway Stations
Michael Stern Signed Area of a Polygon
Signed Area of a Polygon
Bruce Atwood (Beloit College) and Stan Wagon (Macalester College)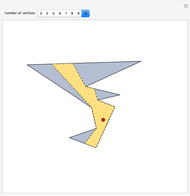 Visible Points in a Polygon
Visible Points in a Polygon
Jaime Rangel-Mondragon Decomposing a Random Newton Polygon
Decomposing a Random Newton Polygon
Kevin Choi Ray Tracing for Points in a Polygon
Ray Tracing for Points in a Polygon
Raja Kountanya An Efficient Test for a Point to Be in a Convex Polygon
An Efficient Test for a Point to Be in a Convex Polygon
Robert Nowak Chains of Regular Polygons and Polyhedra
Chains of Regular Polygons and Polyhedra
George Beck Fermat-Weber Point of a Polygonal Chain
Fermat-Weber Point of a Polygonal Chain
Bhaswar B. Bhattacharya Country Groups
Country Groups
Stephen Wolfram
-
 Fish-in-Pond Simulation
Fish-in-Pond Simulation
Te-yuan Chyou -
 Country Interior: Two Solutions to the Nonconvex Polygon Interior Problem
Country Interior: Two Solutions to the Nonconvex Polygon Interior Problem
Te-yuan Chyou -
 The Block Pushing Game
The Block Pushing Game
Te-yuan Chyou -
 Dynamics of a Cube-Shaped Mass-Spring Network
Dynamics of a Cube-Shaped Mass-Spring Network
Te-yuan Chyou -
 Building a Velocity Sensor
Building a Velocity Sensor
Te-yuan Chyou -
 Eyeball and Two Muscles
Eyeball and Two Muscles
Te-yuan Chyou -
 Inside World of the Torus
Inside World of the Torus
Te-yuan Chyou -
 Rimless Wheel Locomotion
Rimless Wheel Locomotion
Te-yuan Chyou