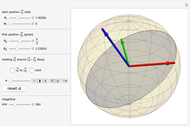
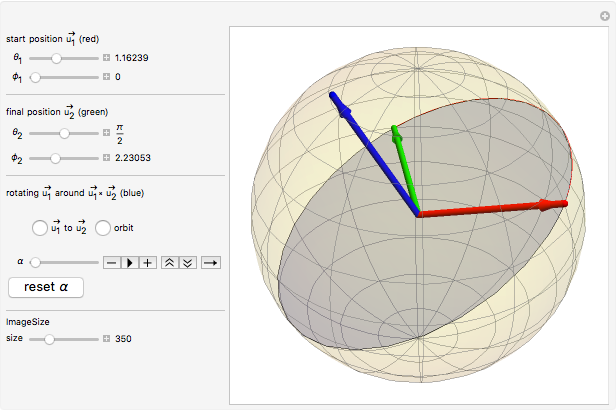
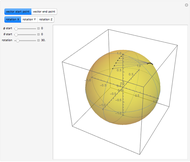
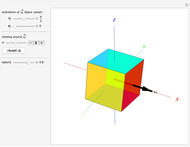
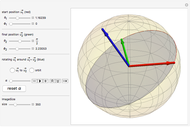
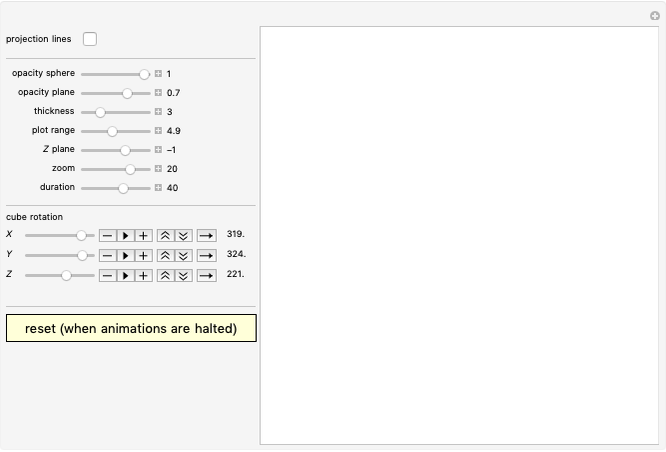
Rotating a Unit Vector in 3D Using Quaternions
Initializing live version




Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
A quaternion is a vector in  with a noncommutative product (see [1] or Quaternion (Wolfram MathWorld)). Quaternions, also called hypercomplex numbers, were invented by William Rowan Hamilton in 1843. A quaternion can be written
with a noncommutative product (see [1] or Quaternion (Wolfram MathWorld)). Quaternions, also called hypercomplex numbers, were invented by William Rowan Hamilton in 1843. A quaternion can be written  or, more compactly,
or, more compactly,  or
or  , where the noncommuting unit quaternions obey the relations
, where the noncommuting unit quaternions obey the relations  .
.









Contributed by: Gerard Balmens (February 2016)
Open content licensed under CC BY-NC-SA
Snapshots


Details
Reference
[1] Wikipedia. "Quaternions and Spatial Rotation." (Feb 9, 2016) en.wikipedia.org/wiki/Quaternions_and_spatial _rotation.
Permanent Citation
Related Demonstrations
More by Author
 Vector Rotations in 3D
Vector Rotations in 3D
Stephen Wilkerson (Towson University) Combining Two 3D Rotations
Combining Two 3D Rotations
George Beck and Jeff Bryant Iterated Matrix Operations in 3D
Iterated Matrix Operations in 3D
Ed Pegg Jr 2D Rotation Using Matrices
2D Rotation Using Matrices
Mito Are and Valeria Antohe Rotation Matrix Entries
Rotation Matrix Entries
Michael Schreiber Decomposing Rotations into Shear Mappings
Decomposing Rotations into Shear Mappings
Nate Orlow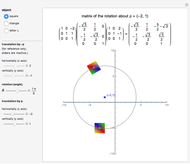 Rotation about a Point in the Plane
Rotation about a Point in the Plane
Ana Moura Santos, Pedro A. Santos, and João Pedro Pargana Roll a Sphere without Changing Orientation to a New Location in Two Straight Rolls
Roll a Sphere without Changing Orientation to a New Location in Two Straight Rolls
Aaron Becker Moving Fingers with Affine Transformations
Moving Fingers with Affine Transformations
Fernando Cisneros Using Eigenvalue Analysis to Rotate in 3D
Using Eigenvalue Analysis to Rotate in 3D
Raja Kountanya
-
 Rotating a Hypercube in Four Dimensions with Eight Spaced Cubes
Rotating a Hypercube in Four Dimensions with Eight Spaced Cubes
Gerard Balmens -
 Rotating a Cube Using Quaternions
Rotating a Cube Using Quaternions
Gerard Balmens -
 Rotating a Unit Vector in 3D Using Quaternions
Rotating a Unit Vector in 3D Using Quaternions
Gerard Balmens -
 The 30 Subgroups of the Symmetric Group on Four Symbols
The 30 Subgroups of the Symmetric Group on Four Symbols
Gerard Balmens -
 Dihedral Group of the Square
Dihedral Group of the Square
Gerard Balmens -
 Stereographic Projection of a Cube
Stereographic Projection of a Cube
Gerard Balmens -
 Stereographic Projection of a Hypercube
Stereographic Projection of a Hypercube
Gerard Balmens -
 Geodesics of a Torus Solved with a Method of Lagrange
Geodesics of a Torus Solved with a Method of Lagrange
Gerard Balmens -
 Billiard in a 4D Hypercube
Billiard in a 4D Hypercube
Gerard Balmens -
 Stereographic Projection of a 4D Clifford Torus
Stereographic Projection of a 4D Clifford Torus
Gerard Balmens -
 Rotating a Hypercube in 4D
Rotating a Hypercube in 4D
Gerard Balmens