Isochrons for a Dubins Car



Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
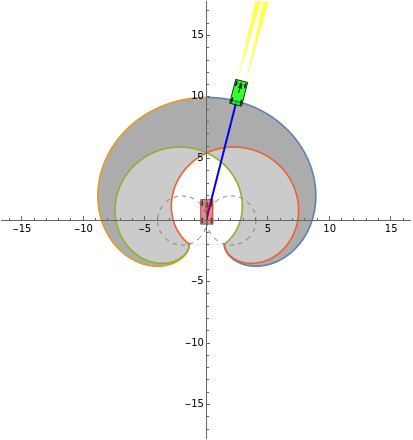
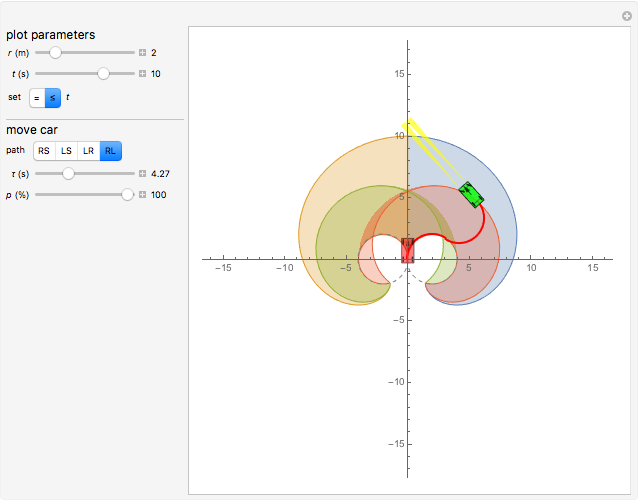
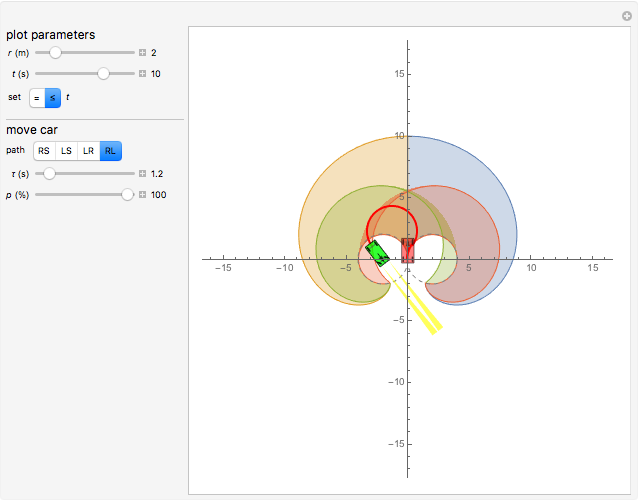
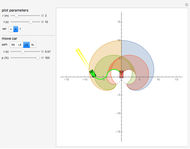
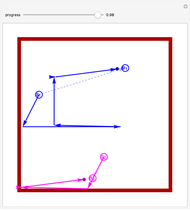
This Demonstration shows the set of  ,
, positions reachable at time
positions reachable at time  by a car with a minimum turning radius
by a car with a minimum turning radius  . This set is bounded by four isochrons. An isochron is a line on a diagram or map connecting points relating to the same or equal times. You can choose whether to show areas reachable at time or less than or equal to . The boundary of this set is defined by turning at the maximum rate in either direction for
. This set is bounded by four isochrons. An isochron is a line on a diagram or map connecting points relating to the same or equal times. You can choose whether to show areas reachable at time or less than or equal to . The boundary of this set is defined by turning at the maximum rate in either direction for  seconds and then either switching directions or moving straight ahead. The percent of the path traveled is denoted by
seconds and then either switching directions or moving straight ahead. The percent of the path traveled is denoted by  .
.
Contributed by: Aaron T. Becker and Shiva Shahrokhi (December 2017)
Open content licensed under CC BY-NC-SA
Snapshots

Details
In 1957, Lester Eli Dubins proved that the shortest path between two  coordinates for a forward-moving vehicle with a minimum turning radius is composed entirely of straight lines or no more than three circular arcs of radius [1].
coordinates for a forward-moving vehicle with a minimum turning radius is composed entirely of straight lines or no more than three circular arcs of radius [1].
This Demonstration gives the reachable set of  , locations from a given starting coordinate. The boundary of this set is reachable by a circular arc of radius followed by either a straight path or a circular arc of radius in the opposite direction. Label a turn to the right at the maximum rate by the letter
, locations from a given starting coordinate. The boundary of this set is reachable by a circular arc of radius followed by either a straight path or a circular arc of radius in the opposite direction. Label a turn to the right at the maximum rate by the letter  , left as
, left as  and straight as
and straight as  ; then the optimal paths to the boundary are
; then the optimal paths to the boundary are  ,
,  ,
,  ,
,  .
.
The Dubins car is a simplified mathematical model of a car that moves on the , plane [1]. The car's location is specified by the  location of the center of the car's rear axle and the orientation
location of the center of the car's rear axle and the orientation  of the car. The car cannot move sideways because the rear wheels would have to slide rather than roll. The Dubins car model stipulates that the car be moving forward at a constant speed and have a maximum steering angle that translates into a minimum turning radius . The minimum turning radius circles are drawn tangent to the starting and ending positions with gray dashed circles.
of the car. The car cannot move sideways because the rear wheels would have to slide rather than roll. The Dubins car model stipulates that the car be moving forward at a constant speed and have a maximum steering angle that translates into a minimum turning radius . The minimum turning radius circles are drawn tangent to the starting and ending positions with gray dashed circles.
If the car has forward velocity of 1 unit per second, the system equations are
 ,
,
 ,
,
and
 ,
,
where  is chosen from the interval
is chosen from the interval  .
.
For a car starting at  , define the switching time as and arc lengths traveled by the car as
, define the switching time as and arc lengths traveled by the car as  and
and  .
.
The car position for an path is
 .
.
For the ending position is
 .
.
For the ending position is
 ,
,
and for the ending position is
 .
.
See [2] for more details.
References
[1] L. E. Dubins, "On Curves of Minimal Length with a Constraint on Average Curvature, and with Prescribed Initial and Terminal Positions and Tangents," American Journal of Mathematics, 79(3), 1957 pp. 497–516. doi:10.2307/2372560.
[2] E. J. Cockayne and G. W. C. Hall, "Plane Motion of a Particle Subject to Curvature Constraints," SIAM Journal on Control, 13(1), 1975 pp. 197–220. doi:10.1137/0313012.
Permanent Citation
 The Homicidal Chauffeur Problem
The Homicidal Chauffeur Problem
Aaron T. Becker and Javier Garcia Shortest Path for the Dubins Car
Shortest Path for the Dubins Car
Aaron T. Becker and Shiva Shahrokhi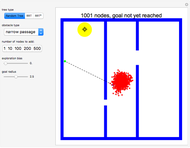 Rapidly Exploring Random Tree (RRT) and RRT*
Rapidly Exploring Random Tree (RRT) and RRT*
Aaron T. Becker and Li Huang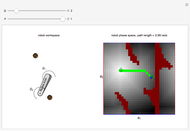 Breadth-First Search Robot Motion Planning
Breadth-First Search Robot Motion Planning
Aaron T. Becker, Benedict Isichei and Praveen Reddy Padala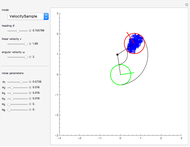 Probabilistic Models for Robot Motion
Probabilistic Models for Robot Motion
Aaron T. Becker and Renuka Pakeetharan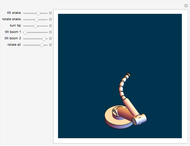 Snake-Arm Robot
Snake-Arm Robot
Sándor Kabai Inverse Kinematics
Inverse Kinematics
Rob Lockhart Forward Kinematics
Forward Kinematics
Rob Lockhart Hand Model
Hand Model
Sándor Kabai Fractal Robot Arm
Fractal Robot Arm
Sándor Kabai
-
 Configuration Space for Four-Bar Linkage
Configuration Space for Four-Bar Linkage
Shiva Shahrokhi -
 Isochrons for a Dubins Car
Isochrons for a Dubins Car
Shiva Shahrokhi -
Shortest Path for the Dubins Car
Shiva Shahrokhi -
 Moving Two Particles with Shared Control Inputs Using Wall Friction
Moving Two Particles with Shared Control Inputs Using Wall Friction
Shiva Shahrokhi -
 Measuring Distance and Orientation Using Camera and Lasers
Measuring Distance and Orientation Using Camera and Lasers
Shiva Shahrokhi